Giới thiệu về Hệ thống điều khiển: Hoạt động, Loại và Ứng dụng
Bạn sử dụng hệ thống điều khiển bất cứ khi nào máy tự động giữ giá trị ổn định, như nhiệt độ, tốc độ hoặc mức.Bài viết này giải thích hệ thống điều khiển là gì, các bộ phận của nó hoạt động cùng nhau như thế nào và phản hồi như thế nào để giữ đầu ra chính xác.Bạn cũng sẽ thấy các loại hệ thống chính và cách chúng hoạt động.Sử dụng chung, lợi ích và giới hạn được bao gồm.Danh mục
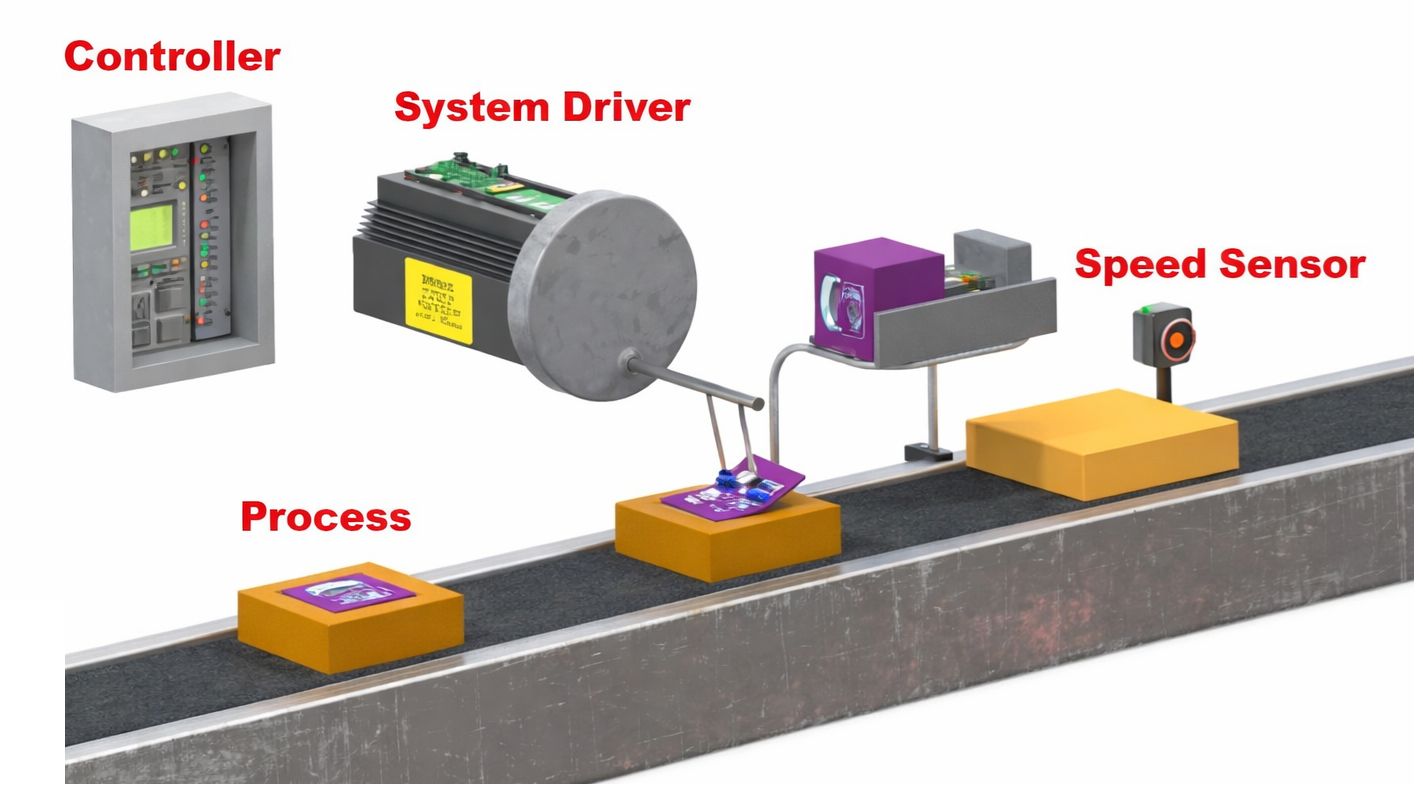
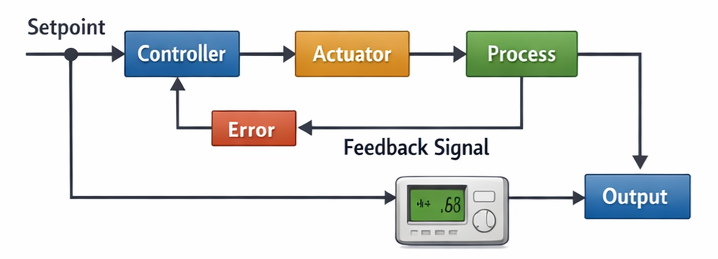
Hình 1. Ví dụ về hệ thống điều khiển
Hệ thống kiểm soát là gì?
Hệ thống điều khiển là hệ thống giữ giá trị đo được gần với giá trị mục tiêu mong muốn.Mục đích của nó là tự động điều chỉnh quy trình để đầu ra luôn chính xác ngay cả khi điều kiện thay đổi.Ví dụ: bộ điều nhiệt trong phòng giữ nhiệt độ gần mức đã đặt và hệ thống điều khiển hành trình trên ô tô sẽ giữ cho xe ở tốc độ đã chọn.Bộ điều khiển mức nước trong bể cũng duy trì độ cao của nước ở mức đã chọn.Nói một cách đơn giản, một hệ thống điều khiển liên tục kiểm tra và hiệu chỉnh một biến để khớp với giá trị yêu cầu.
Các yếu tố cơ bản của một hệ thống điều khiển
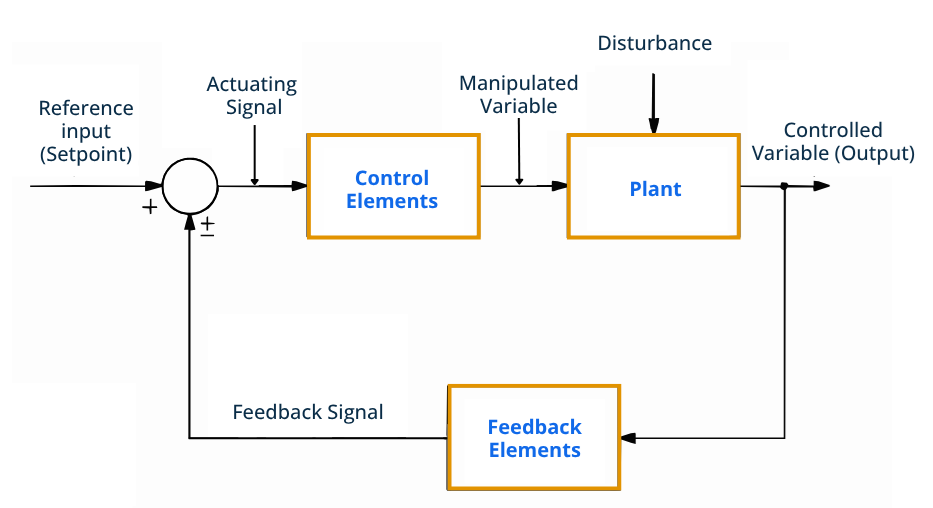
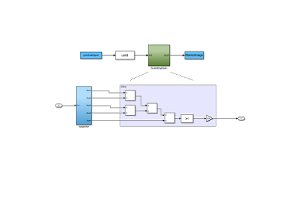
Hình 2. Sơ đồ khối hệ thống điều khiển
Một hệ thống điều khiển được tạo thành từ một số bộ phận tiêu chuẩn, mỗi bộ phận thực hiện một nhiệm vụ cụ thể.
• Đầu vào tham chiếu (Điểm đặt)
Đây là giá trị mong muốn mà hệ thống cố gắng duy trì.Nó đại diện cho điều kiện mục tiêu đã chọn.Hệ thống luôn so sánh giá trị thực tế với tham chiếu này.
• Tín hiệu kích hoạt
Đây là tín hiệu được tạo ra sau khi so sánh giá trị mong muốn và giá trị thực tế.Nó thể hiện mức độ điều chỉnh cần thiết.Tín hiệu chuẩn bị cho hệ thống điều chỉnh.
• Yếu tố điều khiển
Những bộ phận này xử lý quá trình ra quyết định.Họ xác định hành động khắc phục dựa trên tín hiệu nhận được.Đầu ra từ giai đoạn này chuẩn bị cho quá trình điều chỉnh.
• Biến thao tác
Đây là số lượng có thể điều chỉnh được gửi tới quá trình này.Việc thay đổi giá trị này sẽ ảnh hưởng đến đầu ra cuối cùng.Đây là biến mà hệ thống có thể thay đổi trực tiếp.
• thực vật
Nhà máy là quá trình được kiểm soát.Nó tạo ra giá trị đầu ra cuối cùng.Hệ thống nhằm mục đích giữ đầu ra này ở mức mong muốn.
• Rối loạn
Đây là một thay đổi không mong muốn ảnh hưởng đến quá trình.Nó có thể đẩy đầu ra ra khỏi giá trị mong muốn.Hệ thống phải bù đắp cho nó.
• Biến được điều khiển (Đầu ra)
Đây là kết quả đo thực tế của quá trình.Nó cho thấy tình trạng hiện tại của hệ thống.Mục tiêu là giữ nó bằng với đầu vào tham chiếu.
• Yếu tố phản hồi
Chúng đo lường đầu ra và gửi thông tin trở lại để kiểm tra.Họ cung cấp cho hệ thống tình trạng hiện tại.Điều này cho phép xác định sự điều chỉnh.
• Tín hiệu phản hồi
Đây là thông tin trả về về giá trị đầu ra.Nó đại diện cho điều kiện của quá trình.Hệ thống sử dụng nó để so sánh.
Nguyên lý làm việc của hệ thống điều khiển
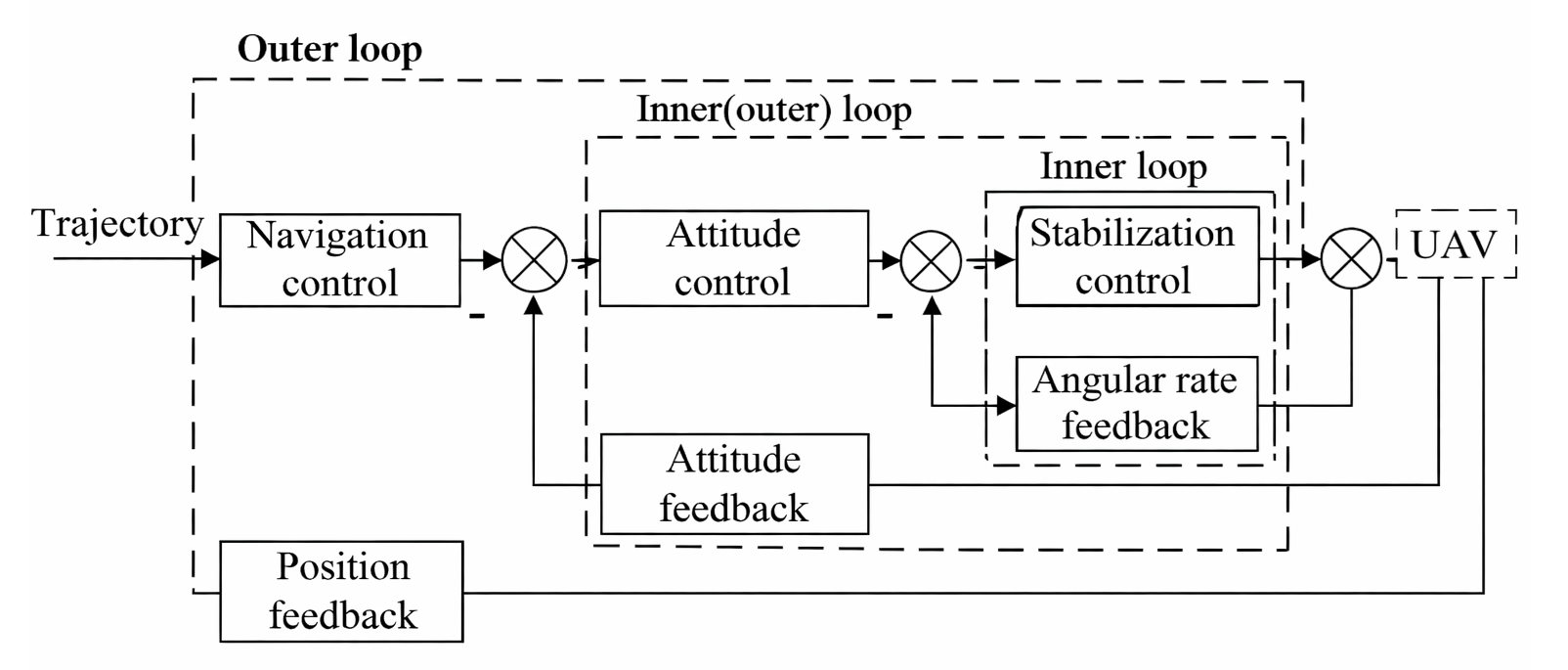
Hình 3. Nguyên lý làm việc của hệ thống điều khiển
Nguyên lý làm việc của hệ thống điều khiển bắt đầu bằng việc cung cấp giá trị đầu vào mong muốn cho hệ thống.Sau đó, hệ thống sẽ so sánh giá trị này với giá trị đầu ra thực tế.Sự khác biệt giữa chúng được gọi là tín hiệu lỗi.Nếu lỗi tồn tại, hệ thống sẽ tạo tín hiệu điều chỉnh.Việc sửa lỗi này điều chỉnh quy trình để giảm lỗi.Đầu ra thay đổi và được kiểm tra lại liên tục.Chu kỳ lặp lại cho đến khi đầu ra khớp với giá trị mong muốn.
Đặc điểm của hệ thống điều khiển
Hệ thống điều khiển được đánh giá dựa trên mức độ hoạt động của chúng trong quá trình vận hành.Những đặc điểm này mô tả chất lượng và độ tin cậy của phản hồi của hệ thống.
|
Đặc điểm |
Mô tả |
|
Tính ổn định |
Đầu ra không
không phân kỳ;trở về giá trị ổn định sau khi nhiễu loạn |
|
Độ chính xác |
Lỗi cuối cùng ≤
±2–5% giá trị cài đặt |
|
Độ chính xác |
đầu ra
biến thiên ≤ ±1% trong cùng một đầu vào |
|
Thời gian đáp ứng
|
ban đầu
phản ứng xảy ra trong thời gian trễ đo được (td) |
|
thời gian tăng |
Thời gian từ 10%
đến 90% giá trị cuối cùng |
|
Thời gian giải quyết |
Nhập và
nằm trong dải ±2% |
|
Vượt quá |
Đỉnh vượt quá
giá trị cuối cùng theo % số tiền |
|
Trạng thái ổn định
Lỗi |
Hằng số
phần bù còn lại sau khi ổn định |
|
Độ nhạy |
ΔĐầu ra /
ΔTỷ lệ thay đổi tham số |
|
Độ bền |
Duy trì
hoạt động bất chấp sự thay đổi nhiễu loạn |
|
Băng thông |
vận hành
hiệu quả lên tới tần số cắt −3 dB |
|
Độ lặp lại |
Đầu vào giống nhau
tạo ra cùng một đầu ra trong phạm vi dung sai |
|
Độ tin cậy |
vận hành
không bị hư hỏng trong thời gian hoạt động định mức (MTBF) |
|
Giảm xóc |
dao động
sự phân rã được xác định bởi tỷ số giảm chấn ζ |
|
Tốc độ của
phản hồi |
Tổng thời gian để
đạt trạng thái ổn định |
Các loại hệ thống điều khiển
Hệ thống điều khiển được phân loại dựa trên cách chúng xử lý thông tin, tín hiệu và hành vi phản hồi.Chúng được nhóm theo cách sử dụng phản hồi, dạng tín hiệu và hành vi toán học.
Hệ thống điều khiển vòng lặp mở
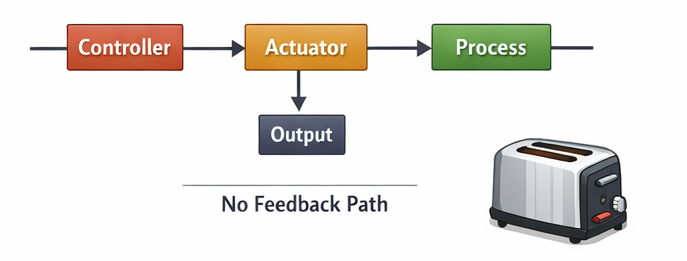
Hình 4. Sơ đồ hệ thống điều khiển vòng hở
Hệ thống điều khiển vòng hở là hệ thống trong đó đầu ra không ảnh hưởng đến hoạt động điều khiển.Hệ thống sẽ gửi lệnh và cho rằng kết quả là đúng mà không cần kiểm tra.Vì không có đường dẫn phản hồi nên nó không thể tự động sửa lỗi hoặc nhiễu loạn.Hiệu suất phụ thuộc chủ yếu vào điều kiện hiệu chuẩn và vận hành thích hợp.Các hệ thống này đơn giản, chi phí thấp và dễ thiết kế.Tuy nhiên, những thay đổi về tải hoặc môi trường có thể ảnh hưởng đến kết quả cuối cùng.Các ví dụ phổ biến bao gồm bộ hẹn giờ nướng bánh bằng điện, bộ hẹn giờ điều khiển máy giặt và bộ hẹn giờ tưới cố định.
Hệ thống điều khiển vòng kín
Hình 5. Sơ đồ hệ thống điều khiển vòng kín
Hệ thống điều khiển vòng kín là hệ thống sử dụng phản hồi để tự động điều chỉnh đầu ra.Hệ thống đo kết quả và so sánh nó với giá trị mong muốn.Nếu có sự khác biệt xuất hiện, việc hiệu chỉnh sẽ được áp dụng để giảm lỗi.Việc điều chỉnh liên tục này cho phép vận hành chính xác và ổn định ngay cả khi các điều kiện khác nhau.Hệ thống vòng kín cung cấp độ chính xác và độ tin cậy cao hơn hệ thống vòng hở.Chúng được sử dụng rộng rãi trong các ứng dụng điều khiển tự động hiện đại.Các ví dụ điển hình bao gồm điều khiển nhiệt độ máy điều hòa, điều khiển hành trình xe và bộ điều chỉnh điện áp tự động.
Hệ thống kiểm soát thời gian liên tục
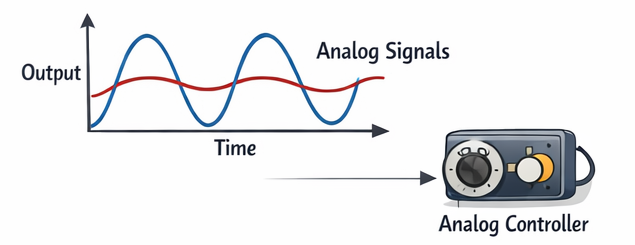
Hình 6. Tín hiệu điều khiển thời gian liên tục (Analog)
Hệ thống điều khiển liên tục theo thời gian xử lý các tín hiệu thay đổi trơn tru theo thời gian.Đầu vào và đầu ra tồn tại mọi lúc, không bị gián đoạn.Các hệ thống này thường hoạt động với tín hiệu điện hoặc cơ tương tự.Vì tín hiệu được truyền liên tục nên phản hồi cũng mượt mà và tự nhiên.Các hệ thống thời gian liên tục thường được tìm thấy trong các bộ điều khiển tương tự truyền thống.Chúng thích hợp cho các quá trình vật lý đòi hỏi phản ứng ngay lập tức.Ví dụ bao gồm bộ điều chỉnh tốc độ analog, điều khiển âm lượng bộ khuếch đại âm thanh và điều khiển vị trí van thủy lực.
Hệ thống kiểm soát thời gian rời rạc
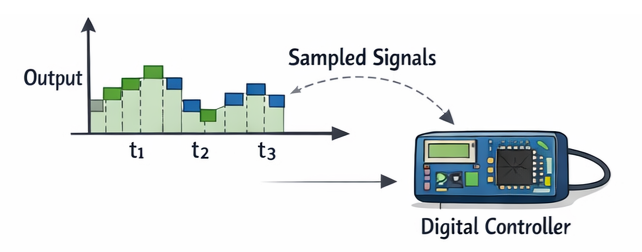
Hình 7. Tín hiệu điều khiển thời gian rời rạc (kỹ thuật số)
Hệ thống điều khiển thời gian rời rạc hoạt động bằng cách sử dụng tín hiệu dữ liệu được lấy mẫu.Hệ thống chỉ kiểm tra và cập nhật giá trị vào những khoảng thời gian cụ thể.Những tín hiệu này thường được xử lý bởi bộ điều khiển kỹ thuật số hoặc bộ vi xử lý.Đầu ra thay đổi từng bước chứ không liên tục.Những hệ thống như vậy cho phép vận hành theo chương trình và điều chỉnh linh hoạt.Chúng được sử dụng rộng rãi trong điều khiển điện tử và máy tính hiện đại.Các ví dụ bao gồm điều khiển nhiệt độ dựa trên vi điều khiển, điều khiển tốc độ động cơ kỹ thuật số và bộ điều nhiệt nhà thông minh.
Hệ thống điều khiển tuyến tính
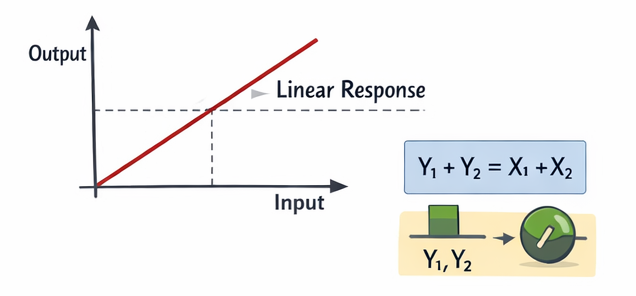
Hình 8. Mối quan hệ đầu vào-đầu ra của hệ thống tuyến tính
Một hệ thống điều khiển tuyến tính tuân theo mối quan hệ tỷ lệ giữa đầu vào và đầu ra.Nếu đầu vào tăng gấp đôi thì đầu ra cũng tăng gấp đôi trong cùng điều kiện.Các hệ thống này đáp ứng nguyên tắc chồng chất trong đó đầu vào kết hợp tạo ra đầu ra kết hợp.Hành vi tuyến tính cho phép phân tích toán học dễ dàng và có thể dự đoán được.Hầu hết các thiết kế điều khiển lý thuyết đều giả định hoạt động tuyến tính để đơn giản.Các mô hình tuyến tính giúp thiết kế các hệ thống ổn định và chính xác.Ví dụ bao gồm bộ khuếch đại điện tử tín hiệu nhỏ và vùng điều khiển động cơ tải thấp.
Hệ thống điều khiển phi tuyến
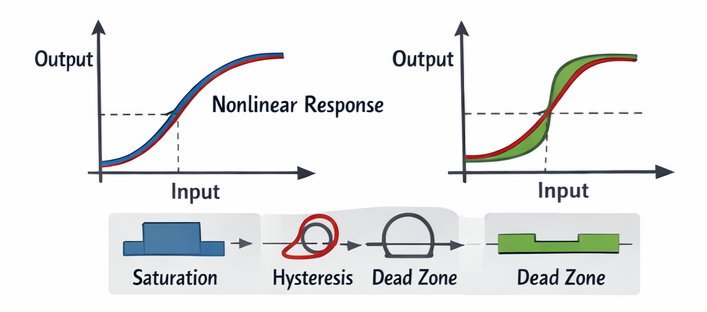
Hình 9. Đặc điểm đáp ứng của hệ thống phi tuyến
Một hệ thống điều khiển phi tuyến có đầu ra không tỷ lệ với đầu vào.Phản ứng thay đổi tùy thuộc vào phạm vi hoạt động hoặc điều kiện.Những thay đổi đầu vào nhỏ có thể tạo ra những biến đổi đầu ra lớn hoặc không hề thay đổi.Các hiệu ứng như độ bão hòa, độ trễ và vùng chết thường xuất hiện.Những hệ thống này khó phân tích hơn nhưng thể hiện các quá trình vật lý chính xác hơn.Nhiều hệ thống tự nhiên hoạt động theo cách phi tuyến tính.Các ví dụ bao gồm giới hạn chuyển động của cánh tay robot, hoạt động của bộ truyền động từ tính và điều khiển lưu lượng van ở các vị trí cực đoan.
Ưu điểm và nhược điểm của hệ thống điều khiển
Hệ thống điều khiển cải thiện tính nhất quán và giảm nỗ lực thủ công nhưng cũng gây ra sự phức tạp và chi phí.
Ưu điểm của hệ thống điều khiển
• Hệ thống giữ đầu ra gần với giá trị yêu cầu trong quá trình vận hành.
• Người vận hành không cần phải điều chỉnh thiết bị bằng tay.
• Máy có thể chạy nhiều giờ mà không thường xuyên phải dừng.
• Hệ thống tự động sửa các thay đổi về điều kiện.
• Trạng thái hoạt động có thể được kiểm tra từ bảng điều khiển hoặc màn hình từ xa.
Nhược điểm của hệ thống điều khiển
• Chi phí thiết lập cao hơn các hệ thống thủ công đơn giản.
• Cần có công nhân lành nghề để lắp đặt và bảo trì.
• Cảm biến và các bộ phận điện tử có thể bị hỏng theo thời gian.
• Việc tìm ra nguyên nhân của vấn đề có thể mất nhiều thời gian hơn.
• Hệ thống phụ thuộc vào nguồn điện ổn định.
Ứng dụng của hệ thống điều khiển
Hệ thống điều khiển được sử dụng trong cả tự động hóa công nghiệp và thiết bị hàng ngày để duy trì hoạt động thích hợp một cách tự động.
1. Sản xuất công nghiệp
Máy sản xuất duy trì kích thước và chất lượng sản phẩm nhất quán.Dây chuyền lắp ráp tự động sử dụng quy định để đảm bảo tính lặp lại.Điều này làm giảm chất thải và cải thiện hiệu quả.
2. Điều chỉnh nhiệt độ
Thiết bị sưởi ấm và làm mát duy trì điều kiện môi trường thoải mái.Các tòa nhà dựa vào sự điều chỉnh tự động để ổn định khí hậu trong nhà.Điều này cải thiện hiệu quả năng lượng và sự thoải mái.
3. Hệ thống giao thông
Xe sử dụng hệ thống kiểm soát tốc độ và độ ổn định để vận hành mượt mà hơn.Những chiếc xe hiện đại bao gồm hệ thống kiểm soát hành trình và lực kéo.Những điều này cải thiện sự an toàn và hiệu suất lái xe.
4. Hệ thống điện
Mạng điện điều chỉnh mức điện áp và tần số.Máy phát điện điều chỉnh đầu ra để phù hợp với nhu cầu tải.Điều này đảm bảo cung cấp điện ổn định.
5. Robot và tự động hóa
Robot thực hiện các nhiệm vụ định vị và chuyển động chính xác.Máy móc tự động hoạt động liên tục với độ chính xác cao.Điều này cho phép sản xuất tiên tiến.
6. Thiết bị y tế
Thiết bị duy trì các điều kiện hoạt động được kiểm soát trong quá trình điều trị.Thiết bị giám sát giữ giá trị trong giới hạn an toàn.Điều này cải thiện sự an toàn và độ tin cậy của bệnh nhân.
7. Thiết bị gia dụng
Các thiết bị hàng ngày tự động quản lý cài đặt vận hành.Máy giặt và tủ lạnh duy trì điều kiện hoạt động thích hợp.Điều này đơn giản hóa công việc hàng ngày.
8. Hệ thống hàng không vũ trụ
Máy bay và máy bay không người lái duy trì điều kiện bay ổn định.Hướng dẫn tự động giữ đúng hướng và độ cao.Điều này hỗ trợ điều hướng đáng tin cậy.
Hệ thống điều khiển vs Tự động hóa vs Hệ thống nhúng
Những công nghệ này có liên quan chặt chẽ với nhau nhưng phục vụ các mục đích kỹ thuật khác nhau trong các sản phẩm công nghiệp và điện tử hiện đại.
|
tính năng |
Kiểm soát
Hệ thống |
Tự động hóa |
Đã nhúng
Hệ thống |
|
Trọng tâm chính |
Quy định của
biến |
Quy trình
thi hành án |
Thiết bị
hoạt động |
|
Mục đích |
Duy trì
giá trị mong muốn |
Thực hiện nhiệm vụ
tự động |
Chạy chuyên dụng
chức năng |
|
Phạm vi |
Cụ thể
hành vi quá trình |
Toàn bộ
quy trình làm việc
|
Độc thân
thiết bị sản phẩm |
|
Quyết định
Khả năng |
Dựa trên
giá trị đo được |
Dựa trên
logic được lập trình |
Dựa trên
phần sụn |
|
Sử dụng phản hồi |
Thường xuyên
bắt buộc |
Tùy chọn |
Tùy chọn |
|
Loại phần cứng |
Cảm biến và
bộ truyền động |
Máy móc và
bộ điều khiển |
vi điều khiển
bảng |
|
Vai trò phần mềm |
Tính toán
và sửa chữa |
Trình tự
và phối hợp |
Thiết bị
logic điều khiển |
|
Loại phản hồi |
liên tục
điều chỉnh |
Nhiệm vụ
thi hành án |
Hoạt động chức năng |
|
Kích thước hệ thống |
Nhỏ đến
trung bình |
Trung bình đến
lớn |
Rất nhỏ |
|
Tính linh hoạt |
Trung bình |
Cao |
bị giới hạn |
|
thời gian
Yêu cầu |
Cao |
Trung bình |
Cao |
|
ứng dụng
Cấp độ |
Cấp độ quy trình |
Cấp nhà máy |
Cấp độ sản phẩm |
|
Ví dụ |
Nhiệt độ
kiểm soát |
Nhà máy
dây chuyền sản xuất |
Đồng hồ thông minh |
|
Tích hợp |
Một phần của
tự động hóa |
Chứa
hệ thống điều khiển |
Hỗ trợ cả hai |
Kết luận
Hệ thống điều khiển duy trì sự ổn định bằng cách liên tục so sánh đầu ra thực tế với giá trị mục tiêu và sửa mọi lỗi.Hiệu suất của chúng phụ thuộc vào các yếu tố cốt lõi như phản hồi, hành động của bộ điều khiển và quy trình được kiểm soát.Các phân loại khác nhau xác định cách xử lý tín hiệu và mức độ chính xác của hệ thống phản ứng với nhiễu loạn.Nhờ những khả năng này, hệ thống điều khiển được ứng dụng rộng rãi trong công nghiệp, giao thông vận tải, năng lượng, thiết bị y tế và thiết bị hàng ngày.
Về chúng tôi
ALLELCO LIMITED
Đọc thêm
Yêu cầu nhanh chóng
Vui lòng gửi một yêu cầu, chúng tôi sẽ trả lời ngay lập tức.
Các câu hỏi thường gặp [FAQ]
1. Sự khác biệt giữa bộ điều khiển và hệ thống điều khiển là gì?
Bộ điều khiển chỉ là thiết bị ra quyết định (như bộ điều khiển PLC hoặc PID).Một hệ thống điều khiển bao gồm bộ điều khiển cộng với các cảm biến, cơ cấu chấp hành và quy trình được điều chỉnh.
2. Điều khiển PID là gì và tại sao nó quan trọng?
Điều khiển PID sử dụng các tác động tỷ lệ, tích phân và đạo hàm để giảm thiểu lỗi một cách nhanh chóng và trơn tru.Nó cải thiện độ ổn định, độ chính xác và tốc độ phản hồi trong hầu hết các hệ thống công nghiệp.
3. Tại sao hệ thống điều khiển đôi khi dao động hoặc săn mồi?
Dao động xảy ra khi sự điều chỉnh quá mạnh hoặc bị trì hoãn.Điều chỉnh kém, cảm biến chậm hoặc tăng quá mức khiến đầu ra liên tục bị vọt lố.
4. Độ bão hòa của bộ truyền động là gì?
Độ bão hòa của bộ truyền động xảy ra khi bộ truyền động đạt đến giới hạn vật lý và không thể tăng thêm công suất.Điều này ngăn hệ thống sửa các lỗi lớn.
5. Hệ thống kiểm soát xử lý sự chậm trễ trong quy trình như thế nào?
Họ sử dụng các phương pháp điều chỉnh, bộ lọc hoặc thuật toán dự đoán để bù đắp độ trễ để việc điều chỉnh diễn ra vào đúng thời điểm.

Hướng dẫn về điện trở 4,7 kΩ: Mã màu, công dụng, kiểm tra và so sánh giá trị
trên 2026/02/16

Bộ ngắt mạch thu nhỏ (MCB): Nguyên lý làm việc, loại, xếp hạng và hướng dẫn lựa chọn
trên 2026/02/15
Bài viết phổ biến
-

Máy tính đặt hướng dẫn phức tạp: Làm thế nào họ thay đổi điện toán?
trên 8000/04/18 147760
-

Pinout và tính năng USB-C
trên 2000/04/18 111969
-
Sử dụng các nguyên thủy mô phỏng hợp nhất xilinx: Hướng dẫn toàn diện về thiết kế và mô phỏng FPGA
trên 1600/04/18 111351
-
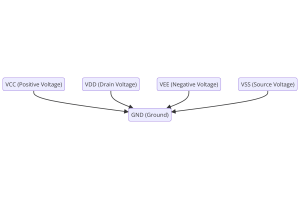
Điện áp nguồn trong điện tử: Ý nghĩa của VCC, VDD, VEE, VSS và GND
trên 0400/04/18 83734
-

Hướng dẫn kết nối RJ45: Pinout, hệ thống dây điện, loại cáp và sử dụng
trên 1970/01/1 79523
-
Hướng dẫn cuối cùng về mã màu dây trong các hệ thống điện hiện đại
Cách hệ thống điện của chúng tôi sử dụng màu sắc không chỉ dành cho ngoại hình.Mỗi màu dây hiện chỉ ra một chức năng cụ thể, giúp xác định và xử lý các thành phần điện một cách dễ dàng hơn trong qu...trên 1970/01/1 66932
-

Hướng dẫn van thanh lọc: Chức năng, triệu chứng, xét nghiệm và thay thế cho hiệu suất động cơ tối ưu
Van thanh lọc là một phần quan trọng của hệ thống xe hơi giúp giữ cho không khí sạch bằng cách quản lý hơi nhiên liệu trước khi chúng có thể thoát vào khí quyển.Điều này không chỉ giúp môi trường b...trên 1970/01/1 63084
-
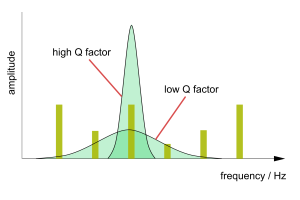
Chất lượng (Q) Yếu tố: Phương trình và ứng dụng
Yếu tố chất lượng, hoặc 'Q', rất quan trọng khi kiểm tra mức độ cuộn cảm và bộ cộng hưởng hoạt động tốt trong các hệ thống điện tử sử dụng tần số vô tuyến (RF).'Q' đo lường mức độ một mạch giảm thi...trên 1970/01/1 63025
-
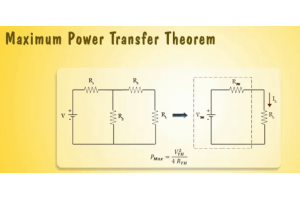
Đạt được hiệu suất cao nhất với Định lý Truyền công suất tối đa
Định lý truyền năng lượng tối đa giải thích cách năng lượng từ một nguồn, chẳng hạn như pin hoặc máy phát, chảy đến tải được kết nối.Nó cho thấy điều kiện chính xác trong đó tải nhận được nhiều năn...trên 1970/01/1 54090
-

Thông số kỹ thuật và khả năng tương thích của pin A23
Pin A23 là một pin nhỏ, hình xi lanh với điện áp cao.Cũng được gọi là 23A, 23AE hoặc MN21, nó chạy ở mức 12 volt và cao hơn nhiều so với pin AA hoặc AAA.Thiết kế đặc biệt của nó làm cho nó...trên 1970/01/1 52163
Số phần nóng
-

AOT2500L
Alpha & Omega Semiconductor Inc.
MOSFET N-CH 150V 11.5/152A TO220
DS80C320-QCG+
Analog Devices Inc./Maxim Integrated
IC MCU 8BIT ROMLESS 44PLCC
DF30FB-40DS-0.4V(81)
Hirose Electric Co Ltd
CONN RCPT 40POS SMD GOLD
A1322LUA-T
Allegro MicroSystems
SENSOR HALL EFFECT ANALOG 3SIP
767163392GPTR13
CTS Resistor Products
RES ARRAY 8 RES 3.9K OHM 16SOIC
LV8404T-TLM-E
onsemi
IC MOTOR DRIVER
PIC18F2321-E/SS
Microchip Technology
IC MCU 8BIT 8KB FLASH 28SSOP
ABMM2-7.3728MHZ-E2-T
Abracon Corporation
CRYSTAL 7.3728MHZ 18PF SMD
SK36SMA
Diotec Semiconductor
SCHOTTKY SMA 60V 3A
BR93L56FV-WE2
Rohm Semiconductor
IC EEPROM 2KBIT SPI 2MHZ 8SSOPB
TMP36GSZ-REEL7
Analog Devices Inc.
SENSOR ANALOG -40C-125C 8SOIC
MAX6350MJA
Analog Devices Inc./Maxim Integrated
IC VREF SERIES 0.02% 8CERDIP
FDP15N40
onsemi
MOSFET N-CH 400V 15A TO220-3
LM340K-5.0
Texas Instruments
IC REG LINEAR 5V 1.5A TO3-2
MOC3162TM
Fairchild Semiconductor
TRIAC OUTPUT OPTOCOUPLER
ATH10K12-9SJL
Artesyn Embedded Power
DC DC CONVERTER 1.2-5.5V 55W
AD7684BRMZRL7
Analog Devices Inc.
IC ADC 16BIT SAR 8MSOP
350561-1
TE Connectivity AMP Connectors
CONN PIN 18-24AWG CRIMP TIN -

2N3054
Microchip Technology
POWER BJT
AD7863ARZ-10
Analog Devices Inc.
IC ADC 14BIT SAR 28SOIC
TPS38B752933DSKR
Texas Instruments
65-V DUAL-CHANNEL SUPERVISOR WIT
MT8889CS1
Microchip Technology
IC TELECOM INTERFACE 20SOIC
SIP2800DY-T1-E3
Vishay Siliconix
IC REG CTRLR MULT TOPOLOGY 8SOIC
0451.125MR
Littelfuse Inc.
FUSE BOARD MNT 125MA 125VAC/VDC
NCV20091SN2T1G
onsemi
IC OPAMP GP 1 CIRCUIT 5TSOP
PIC16LF876-04/SO
Microchip Technology
IC MCU 8BIT 14KB FLASH 28SOIC
08053C153JAT2A
KYOCERA AVX
CAP CER 0.015UF 25V X7R 0805
ST72F621L4M1
STMicroelectronics
IC MCU 8BIT 16KB FLASH 34SOIC
IRGP50B60PDPBF
International Rectifier
AUTOMOTIVE WARP2 IGBT ULTRAFAST
RT1206BRE07300KL
YAGEO
RES SMD 300K OHM 0.1% 1/4W 1206
ISL6560CB
Renesas Electronics America Inc
IC REG CTRLR BUCK 16SOIC
CL10B224KO8SFNC
Samsung Electro-Mechanics
CAP CER 0.22UF 16V X7R 0603
F1827HD600
Sensata-Crydom
MODULE SCR/DIODE 25A 240VAC
ICL3223ECA-T
Renesas Electronics America Inc
IC TRANSCEIVER FULL 2/2 20SSOP
TPS62800YKAR
Texas Instruments
IC REG BUCK ADJ/FIX 1A 6DSBGA
ITS4200SMENHUMA1
Infineon Technologies
IC PWR SWTCH N-CHAN 1:1 SOT223-4 -

MC1032P
Motorola
LOGIC CIRCUIT, ECL
UC2843AQDR
Texas Instruments
IC REG CTRLR MULT TOP 14SOIC
MSB22ML
Diodes Incorporated
LOW POWER BRIDGE MSB T&R 2.5K
RP110K301B-TR
Nisshinbo Micro Devices Inc.
IC REG LINEAR 3V 150MA DFN0808-4
GRM319R61A106KE19J
Murata Electronics
CAP CER 10UF 10V X5R 1206
GRM1555C2A8R7DA01J
Murata Electronics
CAP CER 8.7PF 100V C0G/NP0 0402
251R14S2R7BV4T
Johanson Technology
CAP CER 2.7PF 250V C0G/NP0 0603
LT1963EST-1.5#PBF
Analog Devices Inc.
IC REG LINEAR 1.5V 1.5A SOT223-3
TPS51225RUKT
Texas Instruments
IC REG QUAD BUCK/LNR SYNC 20WQFN
MCP23S18T-E/SO
Microchip Technology
IC XPNDR 10MHZ SPI 28SOIC
SY100ELT21LZC
Microchip Technology
IC TRANSLTR UNIDIRECTIONAL 8SOIC
MP8007GV-Z
Monolithic Power Systems Inc.
IC POE CNTRL 802.3AF 28QFN
STM6718TWWY6F
STMicroelectronics
IC SUPERVISOR 2 CHANNEL SOT23-5
F930J227KCC
KYOCERA AVX
CAP TANT 220UF 10% 6.3V 2312
PSMN016-100YS,115
Nexperia USA Inc.
MOSFET N-CH 100V 51A LFPAK56
AD8051AR-REEL
Analog Devices Inc.
IC OPAMP VF R-R LDIST LP 8SOIC
DRV8876NPWPR
Texas Instruments
IC MOTOR DRIVER DC 5.5V 16HTSSOP
SB2H100-E3/54
Vishay General Semiconductor - Diodes Division
DIODE SCHOTTKY 100V 2A DO204AC