Khám phá bộ vi điều khiển Atmega2560
Bộ vi điều khiển ATMEGA2560, một đại diện nổi bật của kiến trúc AVR RISC, được tổ chức vì hiệu quả của nó, trong việc thực hiện các hướng dẫn mạnh mẽ trong một chu kỳ đồng hồ duy nhất.Bài viết này đi vào các thông số kỹ thuật cơ bản của ATMEGA2560, bao gồm bộ nhớ mở rộng, cấu hình pinout linh hoạt và các giao thức truyền thông đa năng như UART, SPI và I2C.Ngoài ra, chúng tôi sẽ khám phá các tính năng đáng chú ý và các ứng dụng khác nhau, từ robot đến IoT, cùng với những hiểu biết thiết kế thực tế để tối đa hóa chức năng của nó.Cho dù bạn đang thiết kế các hệ thống điều khiển phức tạp hoặc các giải pháp tiết kiệm năng lượng, bài viết này sẽ cung cấp kiến thức để tận dụng tiềm năng đầy đủ của ATMEGA2560 trong các dự án của bạn.Danh mục
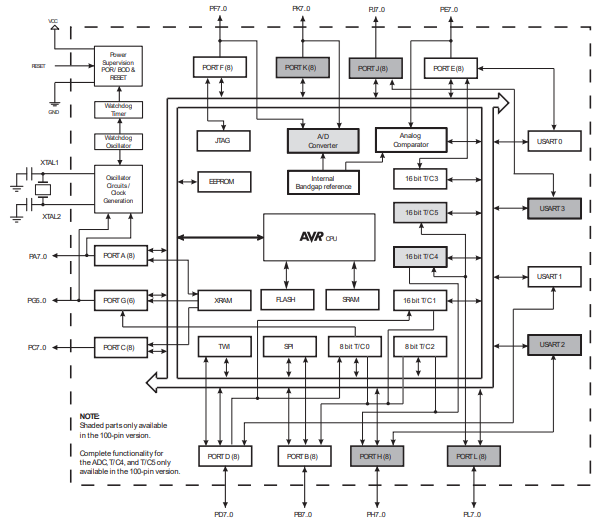
Tổng quan Atmega2560
Các Atmega2560 đóng vai trò là người vi điều khiển trong các bảng Arduino Mega 2560, được tổ chức vì sức mạnh của nó trong việc quản lý cả các ứng dụng mạnh mẽ và phức tạp.Hoạt động với kiến trúc dựa trên AVR RISC, nó kết hợp tối ưu vận tốc xử lý với bảo tồn năng lượng, thực hiện các lệnh phức tạp trong một chu kỳ đồng hồ duy nhất.Thuộc tính này không chỉ là một khái niệm trừu tượng;Ngược lại, các nhà phát triển tài nguyên rộng rãi về việc rèn các hệ thống tương tác liền mạch hoạt động trong thời gian thực.
Ngoài thiết kế kết cấu, ATMEGA2560 thể hiện sự pha trộn của việc thực hiện nhanh chóng với việc sử dụng năng lượng chánh niệm.Sự nhanh nhẹn của nó trong việc quản lý các nhiệm vụ phức tạp làm cho nó trở thành một lựa chọn được tìm kiếm cho các dự án có ý thức về năng lượng.Thật vậy, nhiều chuyên gia trong ngành đã khai thác một cách khéo léo sức mạnh tổng hợp này để đưa ra các chương trình quản lý năng lượng trong các thiết bị phụ thuộc vào pin, do đó kéo dài đáng kể các giai đoạn chức năng của họ mà không làm giảm hiệu suất.
Khả năng thích ứng rộng rãi của ATMEGA2560 tìm thấy tiếng vang trong các lĩnh vực khác nhau, chẳng hạn như robot và giám sát sinh thái.Mảng rộng lớn của các thiết bị ngoại vi tích hợp giúp tăng tốc độ phát triển và giảm sự phụ thuộc vào phần cứng bổ sung, giảm bớt hành trình thiết kế.Vẽ từ kinh nghiệm cá nhân, các nhà phát triển thường xác nhận tính linh hoạt của nó trong việc chế tạo các hệ thống mô -đun đòi hỏi khả năng mở rộng và tạo mẫu nhanh chóng;Những phản ánh này được tô màu bởi niềm đam mê nhiệt thành của chính họ và những đánh giá sâu sắc.
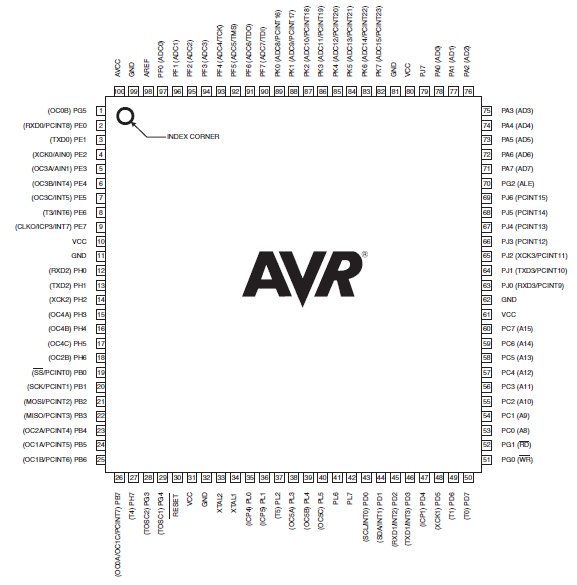
Cấu hình pin Atmega2560
|
Số pin |
Tên pin |
Tên pin được ánh xạ |
|
1 |
PG5 (OC0B) |
Chân kỹ thuật số 4 (PWM) |
|
2 |
PE0 (RXD0/PCINT8) |
Chân kỹ thuật số 0 (RX) |
|
3 |
PE1 (TXD0) |
Chân kỹ thuật số 1 (TX) |
|
4 |
PE2 (XCK0/AIN0) |
|
|
5 |
PE3 (OC3A/AIN1) |
Chân kỹ thuật số 5 (PWM) |
|
6 |
PE4 (OC3B/INT4) |
Chân kỹ thuật số 2 (PWM) |
|
7 |
PE5 (OC3C/INT5) |
Chân kỹ thuật số 3 (PWM) |
|
8 |
PE6 (T3/INT6) |
|
|
9 |
PE7 (CLK0/ICP3/INT7) |
|
|
10 |
VCC |
VCC |
|
11 |
GND |
GND |
|
12 |
PH0 (RXD2) |
Chân kỹ thuật số 17 (RX2) |
|
13 |
PH1 (TXD2) |
Chân kỹ thuật số 16 (TX2) |
|
14 |
Ph2 (XCK2) |
|
|
15 |
Ph3 (OC4A) |
Chân kỹ thuật số 6 (PWM) |
|
16 |
Ph4 (OC4B) |
Chân kỹ thuật số 7 (PWM) |
|
17 |
PH5 (OC4C) |
Chân kỹ thuật số 8 (PWM) |
|
18 |
PH6 (OC2B) |
Chân kỹ thuật số 9 (PWM) |
|
19 |
PB0 (SS/PCINT0) |
Chân kỹ thuật số 53 (SS) |
|
20 |
PB1 (SCK/PCINT1) |
Chân kỹ thuật số 52 (SCK) |
|
21 |
PB2 (MOSI/PCINT2) |
Chân kỹ thuật số 51 (MOSI) |
|
22 |
PB3 (MISO/PCINT3) |
Pin kỹ thuật số 50 (miso) |
|
23 |
PB4 (OC2A/PCINT4) |
Chân kỹ thuật số 10 (PWM) |
|
24 |
PB5 (OC1A/PCINT5) |
Chân kỹ thuật số 11 (PWM) |
|
25 |
PB6 (OC1B/PCINT6) |
Chân kỹ thuật số 12 (PWM) |
|
26 |
PB7 (OC0A/OC1C/PCINT7) |
Chân kỹ thuật số 13 (PWM) |
|
27 |
Ph7 (T4) |
|
|
28 |
PG3 (TOSC2) |
|
|
29 |
PG4 (TOSC1) |
|
|
30 |
CÀI LẠI |
CÀI LẠI |
|
31 |
VCC |
VCC |
|
32 |
GND |
GND |
|
33 |
XTAL2 |
XTAL2 |
|
34 |
XTAL1 |
XTAL1 |
|
35 |
PL0 (ICP4) |
Chân kỹ thuật số 49 |
|
36 |
PL1 (ICP5) |
Chân kỹ thuật số 48 |
|
37 |
PL2 (T5) |
Chân kỹ thuật số 47 |
|
38 |
PL3 (OC5A) |
Chân kỹ thuật số 46 (PWM) |
|
39 |
PL4 (OC5B) |
Chân kỹ thuật số 45 (PWM) |
|
40 |
PL5 (OC5C) |
Chân kỹ thuật số 44 (PWM) |
|
41 |
PL6 |
Chân kỹ thuật số 43 |
|
42 |
PL7 |
Chân kỹ thuật số 42 |
|
43 |
PD0 (SCL/INT0) |
Pin kỹ thuật số 21 (SCL) |
|
44 |
PD1 (SDA/INT1) |
Chân kỹ thuật số 20 (SDA) |
|
45 |
PD2 (RXD1/INT2) |
Chân kỹ thuật số 19 (RX1) |
|
46 |
PD3 (TXD1/INT3) |
Chân kỹ thuật số 18 (TX1) |
|
47 |
PD4 (ICP1) |
|
|
48 |
PD5 (XCK1) |
|
|
49 |
PD6 (T1) |
|
|
50 |
PD7 (T0) |
Pin kỹ thuật số 38 |
|
51 |
PG0 (WR) |
Chân kỹ thuật số 41 |
|
52 |
PG1 (RD) |
Chân kỹ thuật số 40 |
|
53 |
PC0 (A8) |
Pin kỹ thuật số 37 |
|
54 |
PC1 (A9) |
Chân kỹ thuật số 36 |
|
55 |
PC2 (A10) |
Chân kỹ thuật số 35 |
|
56 |
PC3 (A11) |
Chân kỹ thuật số 34 |
|
57 |
PC4 (A12)
|
Pin kỹ thuật số 33 |
|
58 |
PC5 (A13) |
Pin kỹ thuật số 32 |
|
59 |
PC6 (A14) |
Pin kỹ thuật số 31 |
|
60 |
PC7 (A15) |
Chân kỹ thuật số 30 |
|
61 |
VCC |
|
|
62 |
GND |
|
|
63 |
PJ0 (RXD3/PCINT9) |
Chân kỹ thuật số 15 (RX3) |
|
64 |
PJ1 (TXD3/PCINT10) |
Chân kỹ thuật số 14 (TX3) |
|
65 |
PJ2 (XCK3/PCINT11) |
|
|
66 |
PJ3 (PCINT12) |
|
|
67 |
PJ4 (PCINT13) |
|
|
68 |
PJ5 (PCINT14) |
|
|
69 |
PJ6 (PCINT15) |
|
|
70 |
PG2 (ALE) |
Chân kỹ thuật số 39 |
|
71 |
PA7 (AD7) |
Chân kỹ thuật số 29 |
|
72 |
PA6 (AD6) |
Chân kỹ thuật số 28 |
|
73 |
PA5 (AD5) |
Chân kỹ thuật số 27 |
|
74 |
PA4 (AD4) |
Pin kỹ thuật số 26 |
|
75 |
PA3 (AD3) |
Chân kỹ thuật số 25 |
|
76 |
PA2 (AD2) |
Chân kỹ thuật số 24 |
|
77 |
PA1 (AD1) |
Chân kỹ thuật số 23 |
|
78 |
PA0 (AD0) |
Chân kỹ thuật số 22 |
|
79 |
PJ7 |
|
|
80 |
VCC |
VCC |
|
81 |
GND |
GND |
|
82 |
PK7 (ADC15/PCINT23) |
Chân tương tự 15 |
|
83 |
PK6 (ADC14/PCINT22) |
Chân tương tự 14 |
|
84 |
PK5 (ADC13/PCINT21) |
Chân tương tự 13 |
|
85 |
PK4 (ADC12/PCINT20) |
Chân tương tự 12 |
|
86 |
PK3 (ADC11/PCINT19) |
Chân tương tự 11 |
|
87 |
PK2 (ADC10/PCINT18) |
Chân tương tự 10 |
|
88 |
PK1 (ADC9/PCINT17) |
Chân tương tự 9 |
|
89 |
PK0 (ADC8/PCINT16) |
Chân tương tự 8 |
|
90 |
PF7 (ADC7/TDI) |
Chân tương tự 7 |
|
91 |
PF6 (ADC6/TMO) |
Chân tương tự 6 |
|
92 |
PF5 (ADC5/TMS) |
Chân tương tự 5 |
|
93 |
PF4 (ADC4/TCK) |
Chân tương tự 4 |
|
94 |
PF3 (ADC3) |
Chân tương tự 3 |
|
95 |
PF2 (ADC2) |
Chân tương tự 2 |
|
96 |
PF1 (ADC1) |
Chân tương tự 1 |
|
97 |
PF0 (ADC0) |
Chân tương tự 0 |
|
98 |
Aref |
Tài liệu tham khảo tương tự |
|
99 |
GND |
GND |
|
100 |
AVCC |
VCC |
Mô hình CAD
Biểu tượng
Dấu chân
Đại diện 3D
Thông số kỹ thuật
Đây là bảng cho các thông số kỹ thuật, thuộc tính, tham số và các phần tương tự như công nghệ vi mạch Atmega2560-16au.
|
Kiểu |
Tham số |
|
Thời gian dẫn đầu của nhà máy |
7 tuần |
|
Gắn kết |
Núi bề mặt |
|
Loại gắn kết |
Núi bề mặt |
|
Gói / trường hợp |
100-TQFP |
|
Số lượng ghim |
100 |
|
Bộ chuyển đổi dữ liệu |
A/D 16x10b |
|
Số lượng I/OS |
86 |
|
Đồng hồ bấm giờ |
Đúng |
|
Nhiệt độ hoạt động |
-40 ° C ~ 85 ° C TA |
|
Bao bì |
Khay |
|
Loạt |
AVR® atmega |
|
Xuất bản |
2009 |
|
Mã JESD-609 |
E3 |
|
Mã PBFREE |
Đúng |
|
Trạng thái một phần |
Tích cực |
|
Mức độ nhạy cảm độ ẩm (MSL) |
3 (168 giờ) |
|
Số lượng chấm dứt |
100 |
|
Chấm dứt |
SMD/SMT |
|
Kết thúc thiết bị đầu cuối |
Mờ Tin (SN) - ủ |
|
Tính năng bổ sung |
Cũng hoạt động ở mức cung cấp tối thiểu 2,7V ở mức 8 MHz |
|
Vị trí thiết bị đầu cuối |
Quad |
|
Mẫu đầu cuối |
Cánh Gull |
|
Nhiệt độ phản xạ cực đại (° C) |
260 |
|
Cung cấp điện áp |
5V |
|
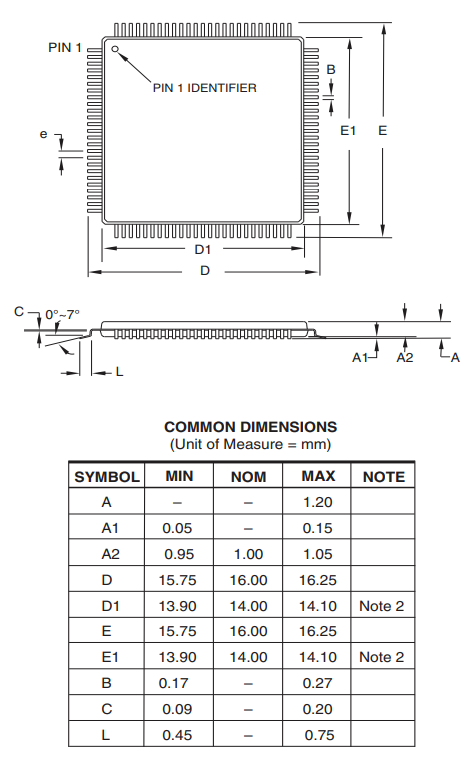
Terminal Pitch |
0,5mm |
|
Tính thường xuyên |
16MHz |
|
Thời gian@Nhiệt độ phản xạ cao điểm (S) |
40 |
|
Số phần cơ sở |
Atmega2560 |
|
Điện áp cung cấp vận hành |
5V |
|
Nguồn cung cấp điện |
5V |
|
Giao diện |
2 dây, EBI/EMI, I2C, SPI, UART, USART |
|
Kích thước bộ nhớ |
256kb |
|
Loại dao động |
Nội bộ |
|
Kích thước ram |
8K x 8 |
|
Điện áp - Cung cấp (VCC/VDD) |
4,5V ~ 5,5V |
|
UPS/UCS/Loại ICS ngoại vi |
Vi điều khiển, RISC |
|
Bộ xử lý cốt lõi |
AVR |
|
Ngoại vi |
Phát hiện/thiết lập lại màu nâu, por, pwm, wdt |
|
Loại bộ nhớ chương trình |
Flash |
|
Kích thước cốt lõi |
8 bit |
|
Kích thước bộ nhớ chương trình |
256kb 128k x 16 |
|
Kết nối |
Ebi/EMI, I2C, SPI, UART/USART |
|
Kích thước bit |
8 |
|
Thời gian truy cập |
16 ss |
|
Có ADC |
Đúng |
|
Kênh DMA |
KHÔNG |
|
Chiều rộng xe buýt dữ liệu |
8b |
|
Số lượng bộ đếm thời gian/quầy |
6 |
|
Tỉ trọng |
2 MB |
|
Kích thước Eeprom |
4K x 8 |
|
Số kênh ADC |
16 |
|
Số kênh PWM |
12 |
|
Số kênh i2c |
1 |
|
Chiều cao |
1.05mm |
|
Chiều dài |
14.1mm |
|
Chiều rộng |
14.1mm |
|
Đạt được SVHC |
Không có SVHC |
|
Bức xạ cứng |
KHÔNG |
|
Trạng thái Rohs |
Rohs3 tuân thủ |
|
Dẫn đầu miễn phí |
Dẫn đầu miễn phí |
Đặc trưng
|
Danh mục tính năng |
Tính năng |
|
Phân đoạn bộ nhớ không bay hơi cao |
Viết/Xóa chu kỳ: 10.000 flash |
|
Hỗ trợ thư viện Atmel QTouch |
Đúng |
|
Giao diện JTAG |
IEEE STD.1149.1 Tuân thủ |
|
Các tính năng ngoại vi |
Quầy thời gian thực với bộ dao động riêng biệt |
|
Đồng hồ bấm giờ có thể lập trình với chip riêng biệt
Dao động |
|
|
Bộ so sánh tương tự trên chip |
|
|
Ngắt và đánh thức thay đổi pin |
|
|
Các tính năng đặc biệt khác |
Thiết lập lại bật nguồn và phát hiện ra màu nâu có thể lập trình |
|
Dao động hiệu chuẩn bên trong |
|
|
Nguồn ngắt bên ngoài và bên trong |
|
|
Chế độ ngủ |
Sáu chế độ: nhàn rỗi, giảm tiếng ồn ADC, tiết kiệm điện,
Sức mạnh xuống, chờ, dự phòng mở rộng |
Ứng dụng
Bộ vi điều khiển ATMEGA2560, được tổ chức với khả năng hiệu suất đặc biệt của nó, đóng vai trò là cơ sở cho nhiều ứng dụng công nghệ đương đại.Việc áp dụng rộng rãi của nó được thúc đẩy bởi khả năng thích ứng và độ tin cậy của nó trên nhiều dự án, giải quyết hiệu quả các nhu cầu hệ thống phức tạp với độ chính xác đáng chú ý.
Đổi mới in 3D
Trong ngành in 3D, ATMEGA2560 đóng vai trò chính trong việc quản lý chuyển động của máy in và đảm bảo vị trí tỉ mỉ của mỗi lớp.Công suất xử lý tinh vi của nó quản lý các thuật toán phức tạp, đảm bảo kết quả chất lượng cao.Bằng cách phối hợp chính xác các hành động động cơ và phân phối dây tóc, nó tăng cường đáng kể độ phân giải và độ chính xác.Bạn thường có thể khai thác các chân I/O mở rộng của vi điều khiển để kết nối một mảng cảm biến và trình điều khiển động cơ, cho phép chuyển động chi tiết.Kinh nghiệm chứng minh rằng tối ưu hóa phần mềm phù hợp cho máy in 3D cụ thể có thể nâng cao chất lượng in và cắt giảm thời gian sản xuất, làm nổi bật bản chất linh hoạt của vi điều khiển.
Điều khiển động cơ
ATMEGA2560 tìm thấy ứng dụng rộng rãi trong các hệ thống điều khiển động cơ, tạo điều kiện thực hiện các thuật toán điều khiển phức tạp cho hiệu suất động cơ đáng tin cậy.Nó cung cấp quy định tốc độ hiệu quả và kiểm soát hướng, đặc biệt có lợi trong các hệ thống robot và công nghiệp đòi hỏi độ chính xác hoạt động chính xác.Trong thực tế, việc tích hợp các cảm biến phản hồi với ATMEGA2560 giúp tăng cường hiệu suất bằng cách cập nhật liên tục các tham số hoạt động.Bạn thường có thể nhấn mạnh giá trị của thử nghiệm và hiệu chuẩn lặp để đạt được điều khiển động cơ vượt trội, dẫn đến tăng năng suất và độ tin cậy của hệ thống.
Cảm biến giao thoa
Đối với giao diện cảm biến, bộ vi điều khiển tạo thành cơ sở để tích hợp các cảm biến tương tự và kỹ thuật số đa dạng, xử lý dữ liệu của họ để cung cấp những hiểu biết có thể hành động.Khả năng này đang hoạt động trong các hệ thống nơi thu thập và giám sát dữ liệu môi trường là cuối cùng, chẳng hạn như trong các trạm thời tiết và các thành phố thông minh.Bạn có thể nêu bật những lợi thế của các kỹ thuật thu thập dữ liệu và thuật toán xử lý tín hiệu để tăng độ tin cậy của các lần đọc cảm biến.Những cách tiếp cận tinh tế này góp phần phát triển các hệ thống giám sát có thẩm quyền và đáp ứng hơn.
Phát hiện nhiệt độ toàn diện
Trong các hệ thống phát hiện nhiệt độ, ATMEGA2560 vượt trội bằng cách quản lý đồng thời nhiều đầu vào cảm biến, hỗ trợ giám sát nhiệt thực tế rộng rãi.Khả năng xử lý mạnh mẽ của nó đảm bảo đọc nhiệt độ chính xác, được sử dụng cho các ứng dụng trong hệ thống kiểm soát khí hậu và an toàn.Việc thực hiện các con đường cảm biến dự phòng thường được khuyến khích tăng cường độ tin cậy của hệ thống, một thực tế chủ yếu có lợi trong các môi trường có sự ổn định nhiệt độ được sử dụng.Điều này minh họa một trạng thái cân bằng giữa kỹ thuật sáng tạo và độ tin cậy thực tế.
Triển khai nhà thông minh và IoT
Trong lĩnh vực tự động hóa gia đình và các hệ thống IoT, ATMEGA2560 trao quyền cho các chức năng nâng cao, từ việc điều chỉnh đèn và thiết bị cho đến các giải pháp an ninh gia đình tinh vi.Các tính năng kết nối của nó đảm bảo tích hợp trơn tru với các giao thức giao tiếp các loại, thúc đẩy một hệ sinh thái gắn kết.Bạn có thể ủng hộ để khám phá các hệ thống lai sử dụng cả công nghệ có dây và không dây để đạt được sự cân bằng tối ưu về hiệu suất và độ tin cậy.Sự tích hợp này thường dẫn đến những trải nghiệm vượt trội và không gian sống thông minh hơn.
Lựa chọn thay thế
• Atmega88
Sơ đồ
Bưu kiện
Nhà sản xuất
Microchip Technology Inc., nằm ở địa phương sôi động của Chandler, Arizona, là một người tạo ra các giải pháp vi điều khiển tiên tiến trên toàn cầu.Việc theo đuổi sự đổi mới và độ tin cậy của công ty đã khắc nó vào một nơi đáng chú ý trong ngành công nghiệp điện tử cạnh tranh.
Các bộ vi điều khiển, được minh họa bởi ATMEGA2560 của Microchip, là cơ bản trong hoạt động của vô số thiết bị điện tử hiện nay.Được sử dụng trong một loạt các thiết bị, việc sử dụng của chúng từ các thiết bị điện tử tiêu dùng cơ bản đến các hệ thống công nghiệp phức tạp.Khả năng thích ứng này là một minh chứng cho tác động của chúng khi họ đóng vai trò chính trong việc định hình hiệu quả, hiệu suất và tiêu thụ năng lượng của thiết bị.
Biểu dữ liệu PDF
Atmega2560-16au DataSheets:
Về chúng tôi
ALLELCO LIMITED
Đọc thêm
Yêu cầu nhanh chóng
Vui lòng gửi một yêu cầu, chúng tôi sẽ trả lời ngay lập tức.
Các câu hỏi thường gặp [FAQ]
1. Arduino có sử dụng atmega2560 không?
Arduino Mega 2560, được cung cấp bởi bộ vi điều khiển ATMEGA2560, nổi bật vì khả năng quản lý các hoạt động phức tạp, phần lớn được tạo điều kiện bởi các chân I/O phong phú và bộ nhớ phác thảo đáng kể.Những thuộc tính này mang lại lợi ích đáng kể cho các nỗ lực như in 3D và robot tinh vi.Bạn có thể thấy khả năng thích ứng của nó hữu ích trong việc mở rộng khả năng dự án.Nhiều người nhấn mạnh cách các chân và khả năng xử lý rộng rãi cho phép phối hợp dữ liệu đồng thời và tích hợp ngoại vi, giúp tăng cường sự phức tạp và phạm vi của các dự án phức tạp.
2. Có phiên bản nhúng của ATMEGA2560 không?
Một phiên bản gói DIP cho ATMEGA2560 không tồn tại, với ATMEGA1284 là thay thế gần nhất về công suất bộ nhớ.Tuy nhiên, nó thiếu các chân I/O và các cổng nối tiếp, thúc đẩy sự cân nhắc hướng tới sự thỏa hiệp giữa kích thước và chiều rộng hoạt động.Trong việc điều hướng địa hình này, bạn có thể chọn công nghệ gắn trên bề mặt để đáp ứng nhu cầu I/O rộng rãi, mặc dù các thách thức lắp ráp và sửa chữa tăng cường.
3. Làm cách nào để đốt cháy bộ tải khởi động cho Arduino Atmega2560?
Thiết lập bộ tải khởi động trên ATMEGA2560 yêu cầu các công cụ cụ thể như USBTinyisp và một quy trình rõ ràng có thể truy cập thông qua Arduino IDE.Nắm vững kỹ thuật này rất hữu ích để giải phóng các khả năng đầy đủ của vi điều khiển, cho phép cài đặt phần sụn được cá nhân hóa và hiệu suất cao nhất.Bạn có thể thường xuyên quan sát rằng một phương thức cài đặt bộ tải khởi động đáng tin cậy làm tăng đáng kể tính nhất quán phát triển và chiến thắng của dự án.
4. Lập trình viên Atmega2560 giỏi nhất là gì?
Atmel-Ice nổi bật như một công cụ ưa thích để lập trình và gỡ lỗi các vi điều khiển ATMEGA2560, được ca ngợi vì khả năng tương thích rộng rãi với các thiết bị ARM® Cortex®-M và AVR.Sức mạnh của nó nằm ở khả năng giải quyết hiệu quả các nhiệm vụ gỡ lỗi đa dạng, do đó tạo điều kiện cho quy trình phát triển.Bạn biết rằng việc sở hữu một lập trình viên tầm cỡ cao như Atmel-Ice có thể nâng cao hiệu quả gỡ lỗi, ảnh hưởng tích cực đến lịch trình dự án.

TMC2208 so với TMC2209: Trình điều khiển bước nào phù hợp với bạn?
trên 2024/11/13

Mô-đun Bluetooth HC-06: Ứng dụng, Kết nối Arduino và Thông số kỹ thuật
trên 2024/11/12
Bài viết phổ biến
-
GND trong mạch là gì?
trên 1970/01/1 3170
-

Hướng dẫn kết nối RJ-45: Mã màu kết nối RJ-45
trên 1970/01/1 2747
-
Hiểu điện áp cung cấp năng lượng trong Điện tử VCC, VDD, VEE, VSS và GND
trên 0400/11/17 2399
-

Các loại kết nối sợi: SC vs LC và LC vs MTP
trên 1970/01/1 2216
-

So sánh giữa DB9 và RS232
trên 1970/01/1 1835
-

Pin LR44 là gì?
Điện, lực lượng phổ biến đó, lặng lẽ thấm vào mọi khía cạnh của cuộc sống hàng ngày của chúng ta, từ các thiết bị tầm thường đến thiết bị y tế đe dọa đến tính mạng, nó đóng một vai trò im lặng.Tuy nhiên, thực sự nắm bắt năng lượng này, đặc biệt là cách lưu trữ và xuất hiện hiệu quả, không phải là nhiệm vụ dễ dàng.Chính tro...trên 1970/01/1 1807
-
Hiểu về các nguyên tắc cơ bản: Kháng tự cảm và tính năng lực
Trong điệu nhảy phức tạp của kỹ thuật điện, một bộ ba các yếu tố cơ bản chiếm giai đoạn trung tâm: tự cảm, điện trở và điện dung.Mỗi người mang những đặc điểm độc đáo chỉ ra nhịp điệu động của các mạch điện tử.Ở đây, chúng tôi bắt đầu một hành trình giải mã sự phức tạp của các thành phần này, để khám phá vai trò riêng ...trên 1970/01/1 1763
-

Hướng dẫn toàn diện về pin CR2430: Thông số kỹ thuật, ứng dụng và so sánh với pin CR2032
Pin Cr2430 là gì?Lợi ích của pin CR2430Định mứcỨng dụng pin CR2430CR2430 tương đươngCR2430 so với CR2032Pin CR2430 Kích thướcNhững gì cần tìm khi mua CR2430 và tương đươngBảng dữ liệu PDFCâu hỏi thường gặp Pin là trái tim của các thiết bị điện tử nhỏ.Trong số nhiều loại có sẵn, các tế bào tiền xu đóng một vai trò quan trọng, thường đ...trên 1970/01/1 1731
-
RF là gì và tại sao chúng ta sử dụng nó?
Công nghệ tần số vô tuyến (RF) là một phần quan trọng của giao tiếp không dây hiện đại, cho phép truyền dữ liệu trên khoảng cách dài mà không có kết nối vật lý.Bài viết này đi sâu vào những điều cơ bản của RF, giải thích làm thế nào bức xạ điện từ (EMR) làm cho giao tiếp RF có thể.Chúng tôi sẽ khám phá các nguyên tắc của EMR, việc...trên 1970/01/1 1722
-
Hướng dẫn toàn diện về HFE trong bóng bán dẫn
Transitor là các thành phần quan trọng trong các thiết bị điện tử hiện đại, cho phép khuếch đại và điều khiển tín hiệu.Bài viết này đi sâu vào kiến thức xung quanh HFE, bao gồm cách chọn giá trị HFE của bóng bán dẫn, cách tìm HFE và mức tăng của các loại bóng bán dẫn khác nhau.Thông qua việc khám phá HFE của chúng tôi, chúng tôi có...trên 5600/11/17 1698
Số phần nóng
-
GRM2196S2A2R6CD01D
Murata Electronics
CAP CER 2.6PF 100V S2H 0805
ISL12058IRUZ-T
Intersil
IC RTC CLK/CALENDAR I2C 8UTDFN
EPM7064STC44-5
Intel
IC CPLD 64MC 5NS 44TQFP
X5163S8-2.7
Renesas Electronics America Inc
IC SUPERVISOR 1 CHANNEL 8SOIC
SP6205ER-L
MaxLinear, Inc.
IC REG LINEAR POS ADJ 500MA 8DFN
GRM31A5C2H391JW01D
Murata Electronics
CAP CER 390PF 500V C0G/NP0 1206
PIC16LF18313-I/RF
Microchip Technology
IC MCU 8BIT 3.5KB FLASH 8UDFN
40CPQ100
Vishay General Semiconductor - Diodes Division
DIODE ARRAY SCHOTTKY 100V TO247
10CL010YE144I7G
Intel
IC FPGA 88 I/O 144EQFP
SMAJ33A
Würth Elektronik
TVS DIODE 33VWM 53.3VC DO214AC
UMK105SL121JV-F
Taiyo Yuden
CAP CER 120PF 50V SL/GP 0402
BAS19W
Taiwan Semiconductor Corporation
SOT-323, 100V, 0.2A, SWITCHING D
MIC69502WU
Micrel Inc.
5 AMP, LOW VIN, LOW VOUT MICRO C
LM185BYH-2.5
Texas Instruments
IC VREF SHUNT 1.5% TO2
SMBJ48CA-E3/5B
Vishay General Semiconductor - Diodes Division
TVS DIODE 48VWM 77.4VC DO214AA
CL10C221KD8NNNC
Samsung Electro-Mechanics
CAP CER 220PF 200V C0G/NP0 0603
ICL7106CM44
Renesas Electronics America Inc
IC DISPLAY DRVR 3.5DIGIT 44MQFP
IR2233JPBF
Infineon Technologies
IC GATE DRVR HALF-BRIDGE 44PLCC -

LDS6202NTGI
Renesas Electronics America Inc
IC TOUCH CTLR 4CH CAP 16VFQFPN
DS620U+
Analog Devices Inc./Maxim Integrated
SENSOR DIGITAL -55C-125C 8UMAX
MEM2012V211RT
TDK Corporation
FILTER LC(PI) 210MHZ SMD
RGPR30BM40HRTL
Rohm Semiconductor
IGBT 430V 30A IGNITION TO252
MPC8250AZUMHBC
NXP USA Inc.
IC MPU MPC82XX 266MHZ 480TBGA
EMC2113-1-AP-TR
Microchip Technology
IC RPM FAN CTRLR 16QFN
UC2902N
Texas Instruments
IC LOAD SHARE CONTROLLER 8DIP
SFF2006G
Taiwan Semiconductor Corporation
DIODE GEN PURP 400V 20A ITO220AB
2SD1781KT146Q
Rohm Semiconductor
TRANS NPN 32V 0.8A SMT3
GRM1555C2A5R8CA01J
Murata Electronics
CAP CER 5.8PF 100V C0G/NP0 0402
EPC1441LI20N
Intel
IC CONFIG DEVICE 20PLCC
ICS1523M
Renesas Electronics America Inc
IC CLOCK SYNTHESIZER 24SOIC
NID6002NT4G
onsemi
IC PWR DRIVER N-CHANNEL 1:1 DPAK
VI-2TL-IX
Vicor Corporation
DC DC CONVERTER 28V 75W
0603YC271KAT2A
KYOCERA AVX
CAP CER 270PF 16V X7R 0603
S-5844A85CD-A4T2U3
ABLIC Inc.
THERMOSTAT OPEN DRAIN HSNT4-B
TLV2460IP
Texas Instruments
IC OPAMP GP 1 CIRCUIT 8DIP
PIC12LF1501-E/MF
Microchip Technology
IC MCU 8BIT 1.75KB FLASH 8DFN -

ISL88031IU8HEZ-TK
Renesas Electronics America Inc
IC SUPERVISOR 5 CHANNEL 8MSOP
R5F100MHAFA#V0
Renesas Electronics America Inc
IC MCU 16BIT 192KB FLASH 80LQFP
C430N
Powerex Inc.
SCR 800V 1070A PRESS-PAK
C3216JB2J332K115AA
TDK Corporation
CAP CER 3300PF 630V JB 1206
NCP600SN350T1G
onsemi
IC REG LINEAR 3.5V 150MA 5TSOP
M74VHC1GT04DTT1G
onsemi
IC INVERTER 1CH 1-INP 5TSOP
HX5084NL
Pulse Electronics
MODULE 4CH EXTEMP GIGABIT 24SOIC
UC2845AQD8
Texas Instruments
IC REG CTRLR MULT TOPOLOGY 8SOIC
GCM1885C2A2R8CA16D
Murata Electronics
CAP CER 2.8PF 100V C0G/NP0 0603
INA190A3IRSWT
Texas Instruments
IC CURR SENSE 1 CIRCUIT 10UQFN
VBO88-12NO7
IXYS
BRIDGE RECT 1P 1.2KV 92A ECOPAC2
MIMXRT685SFVKB
NXP USA Inc.
IC MCU 32BIT EXT MEM 176VFBGA
CD54ACT08F3A
Texas Instruments
CD54ACT08 QUAD 2-INPUT AND GATES
MCP6284-E/ST
Microchip Technology
IC OPAMP GP 4 CIRCUIT 14TSSOP
TPS536C7B1RSLR
Texas Instruments
IC POWER
9DBL0253ANLGI8
Renesas Electronics America Inc
9DBL0253A 2-O/P LP-HCSL ZDB, ZO=
BQ24210DQCR
Texas Instruments
IC BATT CHG LI-ION 1CELL 10WSON
GRM1885C1H470JA01D
Murata Electronics
CAP CER 47PF 50V C0G/NP0 0603