Tìm hiểu các vấn đề về nguồn khởi động LPC84x và trình tự khởi động hoàn chỉnh
Bộ vi điều khiển LPC84x được sử dụng rộng rãi trong các hệ thống nhúng vì chúng kết hợp sức mạnh xử lý, bộ nhớ và các thiết bị ngoại vi trong một thiết bị nhỏ gọn.Để đảm bảo hoạt động đáng tin cậy, bạn cần hiểu cách khởi động bộ vi điều khiển và điều kiện nguồn điện ảnh hưởng đến hoạt động của nó như thế nào.Bài viết này giải thích các tính năng và kiến trúc chính của bộ vi điều khiển LPC84x, cùng với các yêu cầu về nguồn điện, cơ chế đặt lại và trình tự khởi động của chúng.Nó cũng thảo luận về các vấn đề thường gặp về nguồn điện khi khởi động và những cách thực tế mà bạn có thể khắc phục chúng.Danh mục

Hình 1. Vi điều khiển LPC84x
Tổng quan về các vấn đề về nguồn điện khởi động LPC84x
Bộ vi điều khiển LPC84x được sử dụng rộng rãi trong các hệ thống nhúng vì chúng kết hợp khả năng xử lý, bộ nhớ và các thiết bị ngoại vi trong một thiết bị nhỏ gọn và tiết kiệm năng lượng.Tuy nhiên, hoạt động tin cậy hay không phụ thuộc rất nhiều vào quá trình cấp nguồn ổn định và được kiểm soát tốt.Trong quá trình khởi động, các vấn đề như điện áp nguồn không ổn định, tốc độ tăng điện áp không phù hợp hoặc điều kiện đặt lại không nhất quán có thể ảnh hưởng đến cách khởi động bộ vi điều khiển.Những tình trạng này có thể khiến thiết bị không thể hoạt động bình thường hoặc làm chậm quá trình khởi động hệ thống.
Tính năng của Vi điều khiển LPC84x
1. Lõi ARM Cortex-M0+
Dòng LPC84x được xây dựng dựa trên bộ xử lý ARM Cortex-M0+, được tối ưu hóa để tiêu thụ điện năng thấp và hiệu suất hiệu quả.Lõi 32 bit này hỗ trợ xử lý ngắt nhanh và thực thi xác định, khiến nó phù hợp với các ứng dụng nhúng.Kiến trúc đơn giản của nó cho phép xây dựng phần sụn nhỏ gọn trong khi vẫn duy trì khả năng xử lý đáng tin cậy.Lõi cũng hỗ trợ các công cụ phát triển ARM tiêu chuẩn để lập trình và gỡ lỗi dễ dàng hơn.
2. Bộ nhớ flash nhúng
Các bộ vi điều khiển này bao gồm bộ nhớ flash trên chip được sử dụng để lưu trữ mã chương trình và phần sụn.Đèn flash bên trong thường cung cấp đủ không gian cho các ứng dụng nhúng mà không yêu cầu thiết bị bộ nhớ ngoài.Đèn flash tích hợp cho phép truy cập hướng dẫn nhanh hơn và cải thiện hiệu quả tổng thể của hệ thống.Nó cũng đơn giản hóa việc thiết kế phần cứng vì bộ vi điều khiển có thể hoạt động độc lập sau khi lập trình.
3. Bộ nhớ SRAM
Dòng LPC84x tích hợp SRAM nội bộ để lưu trữ dữ liệu thời gian chạy và hoạt động ngăn xếp.Bộ nhớ này cho phép truy cập nhanh các biến, bộ đệm và dữ liệu xử lý tạm thời.SRAM nhanh cải thiện tốc độ thực thi vì CPU có thể truy cập dữ liệu mà không cần chờ bộ nhớ ngoài.Nó cũng hỗ trợ các hoạt động đa nhiệm trong các ứng dụng nhúng.
4. Giao diện truyền thông nối tiếp linh hoạt
Nhiều thiết bị ngoại vi giao tiếp có sẵn để kết nối các thiết bị và mô-đun bên ngoài.Chúng bao gồm giao diện UART cho giao tiếp nối tiếp, giao diện SPI cho giao tiếp ngoại vi tốc độ cao và giao diện I2C cho mạng cảm biến và điều khiển.Các khối giao tiếp tích hợp này giúp đơn giản hóa việc tích hợp phần cứng trong các thiết kế nhúng.Nó có thể được sử dụng để kết nối màn hình, cảm biến, thiết bị bộ nhớ và các thành phần kỹ thuật số khác.
5. Hỗ trợ ngoại vi tương tự
Bộ vi điều khiển LPC84x bao gồm các tính năng tương tự tích hợp như Bộ chuyển đổi tương tự sang số (ADC) 12 bit.Điều này cho phép thiết bị đo tín hiệu tương tự từ cảm biến hoặc mạch bên ngoài.Một số biến thể còn bao gồm chức năng Bộ chuyển đổi Kỹ thuật số sang Tương tự (DAC) để tạo đầu ra tương tự.Những khả năng này cho phép bộ vi điều khiển giao tiếp trực tiếp với tín hiệu.
6. Cấu hình I/O linh hoạt
Các chân đầu vào/đầu ra (GPIO) có mục đích chung cho phép bộ vi điều khiển tương tác với các thành phần phần cứng bên ngoài.LPC84x bao gồm các tính năng cấu hình chân linh hoạt cho phép gán nhiều chức năng cho một chân duy nhất.Tính linh hoạt này giúp tối ưu hóa bố cục PCB và tối đa hóa các thiết bị ngoại vi có sẵn.Các chân GPIO có thể được cấu hình cho các chức năng đầu vào, đầu ra kỹ thuật số hoặc các chức năng ngoại vi thay thế.
7. Chế độ hoạt động năng lượng thấp
Các chế độ năng lượng thấp được đưa vào để giảm mức tiêu thụ năng lượng trong các ứng dụng chạy bằng pin.Các chế độ này cho phép bộ vi điều khiển vô hiệu hóa các thiết bị ngoại vi không sử dụng hoặc giảm tần số xung nhịp hệ thống trong thời gian rảnh.Tính năng quản lý năng lượng giúp kéo dài tuổi thọ pin trong thiết bị di động.Hệ thống có thể nhanh chóng trở lại hoạt động tích cực khi có yêu cầu.
8. Mô-đun điều khiển và hẹn giờ tích hợp
Nhiều mô-đun hẹn giờ khác nhau được tích hợp để hỗ trợ đo thời gian, tạo tín hiệu và kiểm soát sự kiện.Chúng bao gồm bộ định thời nhiều tốc độ, bộ định thời có thể định cấu hình trạng thái và bộ định thời giám sát.Bộ hẹn giờ cho phép điều khiển thời gian chính xác trong các hệ thống nhúng như điều khiển động cơ, thời gian liên lạc hoặc lập lịch tác vụ định kỳ.Các mô-đun này cải thiện độ tin cậy và hiệu suất của hệ thống.
Tổng quan về sơ đồ khối LPC84x
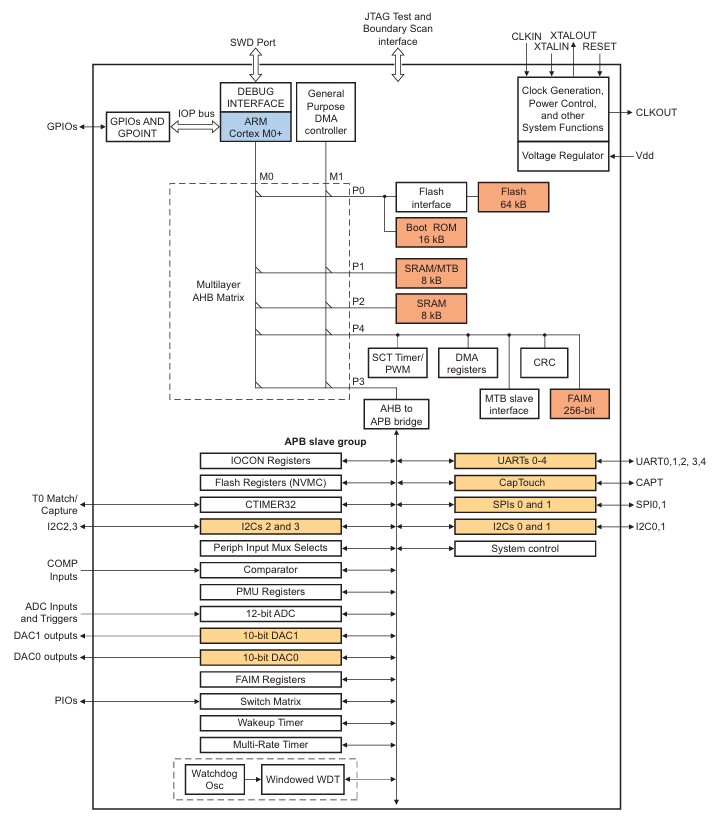
Hình 2. Sơ đồ khối vi điều khiển LPC84x
Kiến trúc LPC84x tích hợp nhiều khối chức năng hoạt động cùng nhau để thực hiện các tác vụ xử lý nhúng.Trung tâm của hệ thống là CPU ARM Cortex-M0+, thực thi các hướng dẫn chương trình được lưu trữ trong bộ nhớ flash bên trong trong khi truy cập dữ liệu từ SRAM.Ma trận bus AHB nhiều lớp kết nối bộ xử lý với các mô-đun bộ nhớ và giao diện ngoại vi, cho phép giao tiếp hiệu quả giữa các bộ phận bên trong.Khối quản lý năng lượng và tạo đồng hồ kiểm soát thời gian của hệ thống và đảm bảo hoạt động ổn định của thiết bị trên các chế độ hiệu suất khác nhau.Các giao diện gỡ lỗi như SWD cho phép lập trình và kiểm tra phần sụn trong quá trình phát triển.Nhiều thiết bị ngoại vi khác nhau, bao gồm bộ hẹn giờ, mô-đun truyền thông và giao diện analog, được kết nối thông qua hệ thống bus nội bộ để cung cấp khả năng tương tác với thiết bị bên ngoài.Cùng với nhau, các khối này tạo thành một kiến trúc vi điều khiển nhỏ gọn được thiết kế để điều khiển nhúng hiệu quả.
Yêu cầu cung cấp điện LPC84x
|
tham số |
Biểu tượng |
Điển hình / Phạm vi |
|
Điện áp cung cấp |
VDD |
1,8V – 3,6V |
|
Điện áp cung cấp tương tự |
VDDA |
1,8V – 3,6V |
|
Điện áp hoạt động (Điển hình) |
VDD |
3,3 V |
|
Ngưỡng điện áp bật nguồn |
VPOR |
~1,5 V (điển hình) |
|
Mức điện áp màu nâu |
VBOR |
Có thể định cấu hình (~1,7–2,7 V) |
|
Chế độ hoạt động hiện tại |
IDD |
Phụ thuộc vào thiết bị |
|
Giấc ngủ sâu hiện tại |
IDD(DS) |
Rất thấp (phạm vi µA) |
|
Điện áp GPIO tối đa |
VIO |
Lên đến VDD |
|
Phạm vi nhiệt độ hoạt động |
TA |
−40°C đến +105°C |
|
Tụ tách rời được đề xuất |
— |
0,1 µF gần mỗi chân VDD |
LPC84x Đặt lại nguồn và hành vi khởi động
Đặt lại khi bật nguồn (POR)
Power-On Reset (POR) là cơ chế đặt lại bên trong tự động kích hoạt khi cấp nguồn lần đầu cho bộ vi điều khiển LPC84x.Mục đích chính của nó là giữ hệ thống ở trạng thái thiết lập lại cho đến khi điện áp nguồn đạt đến mức vận hành an toàn.Khi thiết bị bật nguồn, mạch POR sẽ giám sát điện áp nguồn và ngăn CPU thực hiện lệnh sớm.Khi điện áp ổn định, điều kiện đặt lại được giải phóng và bộ xử lý bắt đầu thực thi mã từ bộ nhớ flash bên trong.Điều này đảm bảo rằng bộ vi điều khiển luôn khởi động ở trạng thái có thể dự đoán được sau khi cấp nguồn.Trong kiến trúc bên trong, hệ thống reset tương tác với các khối quản lý xung nhịp và nguồn trước khi bắt đầu hoạt động bình thường.Cơ chế này tạo thành nền tảng của quá trình khởi động LPC84x.
Đặt lại màu nâu (BOR)
Thiết lập lại Brown-Out (BOR) là cơ chế bảo vệ đặt lại bộ vi điều khiển LPC84x khi điện áp nguồn giảm xuống dưới ngưỡng vận hành an toàn.Mục đích của nó là ngăn CPU hoạt động trong điều kiện điện áp không ổn định có thể gây ra hành vi không thể đoán trước.Khi điện áp giảm xuống dưới mức được định cấu hình, mạch BOR sẽ kích hoạt thiết lập lại hệ thống để bảo vệ bộ nhớ và trạng thái ngoại vi.Sau khi điện áp nguồn trở về mức ổn định, thiết bị khởi động lại bình thường.Tính năng này giúp duy trì hoạt động đáng tin cậy trong các hệ thống có thể xảy ra dao động điện.Trong kiến trúc bên trong, các mạch giám sát điện áp hoạt động cùng với khối điều khiển nguồn để phát hiện các điều kiện điện áp thấp.Nhờ đó, bộ vi điều khiển có thể phục hồi an toàn sau khi điện áp bị sụt giảm tạm thời.
Pin đặt lại bên ngoài (RESET)
Chân RESET bên ngoài cung cấp phương pháp phần cứng để đặt lại bộ vi điều khiển LPC84x từ bên ngoài chip.Nó cho phép các thiết bị bên ngoài hoặc tín hiệu điều khiển buộc bộ vi điều khiển vào trạng thái đặt lại khi cần.Khi tín hiệu RESET hoạt động, bộ xử lý sẽ ngừng thực hiện các lệnh và quay trở lại điều kiện khởi động ban đầu.Điều này đảm bảo rằng hệ thống có thể khởi động lại sạch sẽ trong một số sự kiện vận hành nhất định.Sau khi tín hiệu reset được giải phóng, thiết bị sẽ thực hiện quá trình khởi tạo bên trong trước khi chạy lại firmware.Kiểm soát thiết lập lại bên ngoài thường được sử dụng trong quá trình lập trình, gỡ lỗi hoặc giám sát hệ thống.Trong cấu trúc hệ thống bên trong, đường dẫn đặt lại này kết nối trực tiếp với bộ điều khiển đặt lại trung tâm.
Thiết lập lại cơ quan giám sát
Việc thiết lập lại cơ quan giám sát xảy ra khi bộ đếm thời gian của cơ quan giám sát phát hiện ra rằng phần mềm hệ thống không còn hoạt động chính xác nữa.Bộ đếm thời gian giám sát liên tục giám sát việc thực hiện chương trình bằng cách yêu cầu cập nhật định kỳ từ chương trình cơ sở đang chạy.Nếu phần mềm không làm mới bộ hẹn giờ trong khoảng thời gian dự kiến, bộ hẹn giờ sẽ hết hạn và kích hoạt thiết lập lại hệ thống.Cơ chế này bảo vệ hệ thống khỏi sự cố phần mềm, vòng lặp vô hạn hoặc lỗi phần mềm không mong muốn.Sau khi thiết lập lại xảy ra, bộ vi điều khiển sẽ khởi động lại và bắt đầu thực hiện lại chương trình.Trong kiến trúc bên trong, bộ định thời giám sát hoạt động cùng với logic điều khiển hệ thống và bộ định thời.Mục đích của nó là cải thiện độ tin cậy của hệ thống tổng thể và duy trì hoạt động liên tục trong các hệ thống nhúng.
Trình tự khởi động LPC84x
1. Ổn định nguồn điện
Khi điện áp được cấp lần đầu tiên vào thiết bị, các mạch bên trong cần một khoảng thời gian ngắn để điện áp nguồn ổn định.Trong giai đoạn này, bộ điều chỉnh bên trong và khối quản lý nguồn sẽ thiết lập mức điện áp phù hợp cho CPU và các thiết bị ngoại vi.Bộ vi điều khiển vẫn không hoạt động trong khi quá trình ổn định này diễn ra.Điều này ngăn cản hành vi không đáng tin cậy trong giai đoạn khởi động sớm.Điện áp ổn định đảm bảo các mạch logic bên trong có thể hoạt động chính xác.
2. Kích hoạt thiết lập lại khi bật nguồn
Sau khi nguồn điện bắt đầu ổn định, mạch Đặt lại khi bật nguồn sẽ giữ bộ xử lý ở trạng thái đặt lại.Việc thiết lập lại này ngăn CPU thực hiện các lệnh cho đến khi điện áp đạt đến mức an toàn.Bộ điều khiển đặt lại giám sát điện áp cung cấp liên tục trong giai đoạn này.Chỉ khi điện áp vượt quá ngưỡng yêu cầu thì thiết lập lại mới bắt đầu được giải phóng.Điều này đảm bảo rằng bộ vi điều khiển khởi động với trạng thái hệ thống sạch.
3. Khởi tạo đồng hồ nội bộ
Sau khi xóa các điều kiện đặt lại, bộ vi điều khiển sẽ khởi động hệ thống đồng hồ bên trong của nó.Bộ tạo xung nhịp khởi động bộ dao động bên trong, cung cấp thời gian cho CPU và các hoạt động ngoại vi.Đồng hồ này trở thành tham chiếu thời gian chính cho việc thực thi hệ thống.Bộ xử lý không thể chạy các lệnh nếu không có nguồn xung nhịp ổn định.Vì vậy, khởi tạo xung nhịp là một giai đoạn quan trọng trong quá trình khởi động hệ thống.
4. Khởi tạo bộ nhớ
Trong giai đoạn tiếp theo, bộ xử lý chuẩn bị các cấu trúc bộ nhớ trong được chương trình sử dụng.Bộ nhớ flash cung cấp hướng dẫn phần sụn, trong khi SRAM lưu trữ dữ liệu thời gian chạy.Hệ thống cũng chuẩn bị bảng vectơ dùng để xử lý ngắt.Thiết lập bộ nhớ này cho phép bộ xử lý xác định chính xác điểm vào chương trình.Khởi tạo bộ nhớ thích hợp đảm bảo thực thi chương trình cơ sở trơn tru.
5. Khởi tạo ngoại vi
Sau khi chuẩn bị bộ nhớ, hệ thống sẽ kích hoạt các thiết bị ngoại vi quan trọng bên trong.Các thiết bị ngoại vi này có thể bao gồm bộ hẹn giờ, mô-đun giao tiếp và thanh ghi điều khiển được yêu cầu bởi phần sụn.Một số thiết bị ngoại vi vẫn bị vô hiệu hóa cho đến khi phần mềm ứng dụng kích hoạt chúng.Giai đoạn khởi tạo đảm bảo rằng môi trường hệ thống cơ bản đã sẵn sàng.Bước này chuẩn bị cho thiết bị thực hiện ứng dụng.
6. Bắt đầu thực thi chương trình cơ sở
Khi tất cả các bước khởi tạo bên trong hoàn tất, bộ xử lý sẽ bắt đầu thực thi phần sụn được lưu trong bộ nhớ flash.Việc thực thi thường bắt đầu từ vectơ đặt lại được xác định trong mã chương trình.Từ thời điểm này, ứng dụng nhúng sẽ kiểm soát hoạt động của hệ thống.Phần sụn cấu hình các thiết bị ngoại vi, xử lý tín hiệu đầu vào và thực hiện các tác vụ hệ thống.Điều này đánh dấu sự chuyển đổi từ khởi động phần cứng sang thời gian chạy ứng dụng.
Các sự cố thường gặp về nguồn khởi động LPC84x
• Tăng điện áp chậm trong quá trình bật nguồn
Nếu điện áp nguồn tăng quá chậm, mạch reset bên trong có thể hoạt động không thể đoán trước.Tốc độ tăng tốc chậm có thể trì hoãn việc phát hành thiết lập lại thích hợp và ảnh hưởng đến việc khởi tạo thiết bị.Trong một số hệ thống, CPU có thể cố gắng khởi động trước khi điện áp hoàn toàn ổn định.Điều này có thể dẫn đến hành vi khởi động không nhất quán.
• Nguồn điện bị nhiễu hoặc mất ổn định
Nhiễu điện trên đường dây cấp điện có thể cản trở quá trình khởi động ổn định của bộ vi điều khiển.Tiếng ồn có thể gây ra hiện tượng sụt điện áp tạm thời và dẫn đến việc thiết lập lại ngoài ý muốn.Những biến động này có thể ảnh hưởng đến đồng hồ bên trong và mạch logic.Kết quả là bộ vi điều khiển có thể khởi động lại nhiều lần.
• Tụ tách không đủ
Việc tách kém gần các chân nguồn của bộ vi điều khiển có thể gây ra điện áp không ổn định trong quá trình khởi động.Sự thay đổi dòng điện nhanh chóng bên trong chip đòi hỏi các tụ điện gần đó để ổn định nguồn cung cấp.Nếu không tách rời thích hợp, điện áp có thể xảy ra đột biến.Sự không ổn định này có thể ảnh hưởng đến việc khởi tạo hệ thống.
• Giảm điện áp khi khởi động
Nếu nguồn điện không thể cung cấp đủ dòng điện khi khởi động, điện áp có thể giảm trong thời gian ngắn.Tình huống này có thể kích hoạt tình trạng thiết lập lại hiện tượng mất điện.Sự sụt giảm như vậy có thể xảy ra khi các thành phần khác trong hệ thống khởi động đồng thời.Những sự sụt giảm tạm thời này có thể làm gián đoạn quá trình khởi động.
•Đặt lại sự mất ổn định tín hiệu
Các tín hiệu đặt lại bên ngoài dao động trong quá trình bật nguồn có thể gây ra tình trạng đặt lại nhiều lần.Nếu tín hiệu đặt lại không ổn định, bộ vi điều khiển có thể không bao giờ hoàn thành quá trình khởi tạo.Điều này có thể ngăn phần sụn hoạt động bình thường.Điều kiện thiết lập lại ổn định là cần thiết để khởi động đáng tin cậy.
• Tính khả dụng của nguồn đồng hồ không phù hợp
Nếu hệ thống dựa vào nguồn đồng hồ bên ngoài không khởi động chính xác thì CPU có thể không chạy đúng cách.Nếu không có tín hiệu đồng hồ ổn định thì việc thực hiện lệnh không thể bắt đầu.Điều này có thể dẫn đến hệ thống có vẻ không phản hồi.Độ ổn định của đồng hồ rất quan trọng khi khởi động bộ vi điều khiển thông thường.
Khắc phục sự cố khi khởi động LPC84x
• Xác minh độ ổn định của điện áp cung cấp
Bước khắc phục sự cố đầu tiên là đo điện áp nguồn của bộ vi điều khiển bằng máy hiện sóng hoặc đồng hồ vạn năng.Điện áp phải duy trì trong phạm vi hoạt động được khuyến nghị trong quá trình khởi động.Bất kỳ sự sụt giảm hoặc tăng vọt đột ngột nào cũng có thể cho thấy sự mất ổn định của nguồn điện.Quan sát dạng sóng điện áp trong quá trình bật nguồn có thể phát hiện ra các vấn đề tiềm ẩn.Điện áp ổn định rất quan trọng để khởi tạo bộ vi điều khiển đáng tin cậy.
• Kiểm tra đặt lại thời gian tín hiệu
Tín hiệu đặt lại phải duy trì ổn định và được đồng bộ hóa chính xác với quá trình bật nguồn.Nhiều người thường theo dõi chốt đặt lại để xác nhận rằng nó hoạt động như mong đợi trong quá trình khởi động.Tín hiệu đặt lại không ổn định hoặc nhiễu có thể liên tục khởi động lại hệ thống.Việc xác minh thời gian đặt lại đảm bảo rằng việc khởi tạo chỉ xảy ra sau khi nguồn điện ổn định.Hành vi đặt lại đúng sẽ hỗ trợ khởi động hệ thống thích hợp.
• Kiểm tra bộ lọc nguồn điện
Các thành phần lọc nguồn như tụ tách cần được kiểm tra cẩn thận.Những tụ điện này giúp duy trì điện áp ổn định trong quá trình thay đổi dòng điện nhanh.Vị trí đặt kém hoặc điện dung không đủ có thể khiến nhiễu điện áp ảnh hưởng đến bộ vi điều khiển.Đảm bảo lọc thích hợp sẽ cải thiện độ tin cậy khởi động.Kiểm tra phần cứng thường có thể phát hiện ra các tụ điện bị thiếu hoặc được đặt không chính xác.
• Xác nhận hoạt động nguồn đồng hồ
Đồng hồ hệ thống phải khởi động chính xác để bộ xử lý thực hiện các hướng dẫn.Kiểm tra tín hiệu dao động để xác nhận hoạt động đúng.Nếu nguồn đồng hồ không khởi động được, CPU không thể chạy chương trình cơ sở.Việc theo dõi tín hiệu đồng hồ giúp xác định xem các mạch định thời có hoạt động chính xác hay không.Hoạt động đồng hồ đáng tin cậy là cần thiết để khởi động bình thường.
• Kiểm tra mã khởi tạo chương trình cơ sở
Mã khởi động bên trong chương trình cơ sở có thể ảnh hưởng đến hành vi khởi tạo hệ thống.Xem lại quy trình xử lý đặt lại và khởi tạo hệ thống.Cấu hình không chính xác của các thanh ghi hệ thống hoặc thiết bị ngoại vi có thể làm trì hoãn hoạt động bình thường.Việc xác minh mã khởi động đảm bảo rằng chương trình cơ sở khởi động phần cứng chính xác.Kiểm tra phần mềm bổ sung cho việc gỡ lỗi phần cứng.
• Quan sát hành vi khởi động bằng công cụ gỡ lỗi
Các giao diện gỡ lỗi như SWD cho phép giám sát hoạt động của bộ xử lý trong quá trình khởi động.Sử dụng các công cụ gỡ lỗi, kiểm tra xem CPU có đạt đến điểm vào chương trình chính hay không.Điểm dừng và nhật ký gỡ lỗi giúp tiết lộ nơi dừng quá trình khởi tạo.Phương pháp này cung cấp cái nhìn sâu sắc có giá trị về hành vi của hệ thống trong giai đoạn khởi động ban đầu.
Kết luận
Khả năng khởi động đáng tin cậy của bộ vi điều khiển LPC84x phụ thuộc vào nguồn điện ổn định, hành vi đặt lại chính xác và hệ thống đồng hồ hoạt động bình thường.Các giai đoạn khởi động quan trọng bao gồm ổn định nguồn, giải phóng thiết lập lại, thiết lập đồng hồ, chuẩn bị bộ nhớ và thực thi chương trình cơ sở.Các vấn đề như sụt áp, nhiễu, tách kém hoặc tín hiệu đặt lại không ổn định có thể làm gián đoạn quá trình này.Thiết kế nguồn điện cẩn thận và xử lý sự cố có hệ thống giúp đảm bảo khởi động ổn định và vận hành hệ thống ổn định.
Về chúng tôi
ALLELCO LIMITED
Đọc thêm
Yêu cầu nhanh chóng
Vui lòng gửi một yêu cầu, chúng tôi sẽ trả lời ngay lập tức.
Các câu hỏi thường gặp [FAQ]
1. Vi điều khiển LPC84x dùng để làm gì?
Bộ vi điều khiển LPC84x thường được sử dụng trong các hệ thống nhúng yêu cầu mức tiêu thụ điện năng thấp và phần cứng nhỏ gọn.Các ứng dụng điển hình bao gồm hệ thống điều khiển công nghiệp, giao diện cảm biến, thiết bị điện tử tiêu dùng và thiết bị IoT.
2. Có thể sử dụng công cụ phát triển nào để lập trình bộ vi điều khiển LPC84x?
Bạn có thể lập trình các thiết bị LPC84x bằng các công cụ tương thích với ARM như Keil MDK, MCUXpresso IDE hoặc IAR Embedded Workbench.Các môi trường này hỗ trợ gỡ lỗi, biên dịch và phát triển chương trình cơ sở.
3. Bộ vi điều khiển LPC84x có cần bộ tạo dao động tinh thể bên ngoài không?
Không, LPC84x bao gồm một bộ dao động bên trong có thể tạo ra đồng hồ hệ thống.Tuy nhiên, một số ứng dụng có thể sử dụng tinh thể bên ngoài để có độ chính xác về thời gian cao hơn.
4. Tốc độ xung nhịp tối đa của bộ vi điều khiển LPC84x là bao nhiêu?
Hầu hết các thiết bị LPC84x hoạt động ở tốc độ xung nhịp lên tới khoảng 30 MHz.Tốc độ này cho phép xử lý hiệu quả trong khi vẫn duy trì mức tiêu thụ điện năng thấp.
5. Bộ vi điều khiển LPC84x có thể được sử dụng trong các thiết bị chạy bằng pin không?
Có, thiết bị LPC84x được thiết kế với nhiều chế độ năng lượng thấp giúp giảm mức tiêu thụ năng lượng trong thời gian nhàn rỗi.Điều này làm cho chúng phù hợp với các thiết bị điện tử cầm tay, nút IoT và hệ thống nhúng chạy bằng pin.

Pin H7 là gì?Kích thước, tính năng và công dụng của xe
trên 2026/03/10

Tìm hiểu đầu nối DVI: Mọi điều bạn cần biết
trên 2026/03/9
Bài viết phổ biến
-

Máy tính đặt hướng dẫn phức tạp: Làm thế nào họ thay đổi điện toán?
trên 8000/04/19 147781
-

Pinout và tính năng USB-C
trên 2000/04/19 112056
-
Sử dụng các nguyên thủy mô phỏng hợp nhất xilinx: Hướng dẫn toàn diện về thiết kế và mô phỏng FPGA
trên 1600/04/19 111352
-
Điện áp nguồn trong điện tử: Ý nghĩa của VCC, VDD, VEE, VSS và GND
trên 0400/04/19 83810
-

Hướng dẫn kết nối RJ45: Pinout, hệ thống dây điện, loại cáp và sử dụng
trên 1970/01/1 79622
-
Hướng dẫn cuối cùng về mã màu dây trong các hệ thống điện hiện đại
Cách hệ thống điện của chúng tôi sử dụng màu sắc không chỉ dành cho ngoại hình.Mỗi màu dây hiện chỉ ra một chức năng cụ thể, giúp xác định và xử lý các thành phần điện một cách dễ dàng hơn trong qu...trên 1970/01/1 66994
-

Hướng dẫn van thanh lọc: Chức năng, triệu chứng, xét nghiệm và thay thế cho hiệu suất động cơ tối ưu
Van thanh lọc là một phần quan trọng của hệ thống xe hơi giúp giữ cho không khí sạch bằng cách quản lý hơi nhiên liệu trước khi chúng có thể thoát vào khí quyển.Điều này không chỉ giúp môi trường b...trên 1970/01/1 63118
-
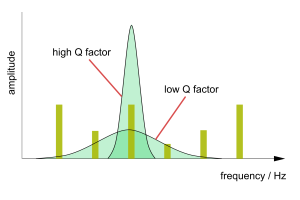
Chất lượng (Q) Yếu tố: Phương trình và ứng dụng
Yếu tố chất lượng, hoặc 'Q', rất quan trọng khi kiểm tra mức độ cuộn cảm và bộ cộng hưởng hoạt động tốt trong các hệ thống điện tử sử dụng tần số vô tuyến (RF).'Q' đo lường mức độ một mạch giảm thi...trên 1970/01/1 63057
-
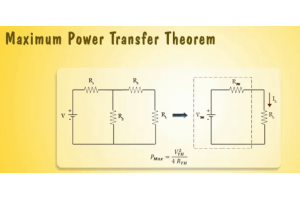
Đạt được hiệu suất cao nhất với Định lý Truyền công suất tối đa
Định lý truyền năng lượng tối đa giải thích cách năng lượng từ một nguồn, chẳng hạn như pin hoặc máy phát, chảy đến tải được kết nối.Nó cho thấy điều kiện chính xác trong đó tải nhận được nhiều năn...trên 1970/01/1 54097
-

Thông số kỹ thuật và khả năng tương thích của pin A23
Pin A23 là một pin nhỏ, hình xi lanh với điện áp cao.Cũng được gọi là 23A, 23AE hoặc MN21, nó chạy ở mức 12 volt và cao hơn nhiều so với pin AA hoặc AAA.Thiết kế đặc biệt của nó làm cho nó...trên 1970/01/1 52207
Số phần nóng
-

MP4460DQ-LF-Z
Monolithic Power Systems Inc.
IC REG BUCK ADJ 2.5A 10QFN
NCV8535MNADJR2G
onsemi
IC REG LIN POS ADJ 500MA 10DFN
LT8362EDD#PBF
Analog Devices Inc.
IC REG BST SEPIC 2A 10DFN
LTC3112IFE#TRPBF
Analog Devices Inc.
IC REG BCK BST ADJ 2.5A 20TSSOP
TPS53681RSBT
Texas Instruments
DUAL-CHANNEL 6+2/5+3 D-CAP+TM MU
CD74HCT11M
Harris Corporation
IC GATE AND 3CH 3-INP 14SOIC
UCC25702N
Texas Instruments
IC REG CTRLR MULT TOPOLOGY 14DIP
MAX5418META+T
Analog Devices Inc./Maxim Integrated
IC DGTL POT 100KOHM 256TAP 8TDFN
CY29942AI
Infineon Technologies
IC CLK BUFFER 1:18 200MHZ 32TQFP
MBR20200CTTU
Fairchild Semiconductor
RECTIFIER DIODE, SCHOTTKY, 1 PHA
AD8669ARZ
Analog Devices Inc.
IC OPAMP GP 4 CIRCUIT 14SOIC
BZX55C11
onsemi
DIODE ZENER 11V 500MW DO35
FODM2701BR2V
onsemi
OPTOISO 3.75KV TRANSISTOR 4SMD
1N4746A
Taiwan Semiconductor Corporation
DIODE ZENER 18V 1W DO204AL
LB11948T-TLM-E
onsemi
IC MTR DRV BIPOLAR 3-15V 30TSSOP
LTC1412CG#PBF
Analog Devices Inc.
IC ADC 12BIT SAR 28SSOP
SP1491EEN-L
MaxLinear, Inc.
IC TRANSCEIVER FULL 1/1 14SOIC
SML-E12DWT86
Rohm Semiconductor
LED ORANGE DIFFUSED 0603 SMD -

AP1661P-G1
Diodes Incorporated
IC PFC CTRLR BCM 8DIP
NTK3139PT1G
onsemi
MOSFET P-CH 20V 660MA SOT723
2SC2412KT146Q
Rohm Semiconductor
TRANS NPN 50V 0.15A SMT3
W632GU8NB-11
Winbond Electronics
IC DRAM 2GBIT PAR 78VFBGA
08055A0R5CAT2A
KYOCERA AVX
CAP CER 0.5PF 50V C0G/NP0 0805
SUD50P10-43L-E3
Vishay Siliconix
MOSFET P-CH 100V 37.1A TO252
BAT68E6327
Infineon Technologies
BAT68 - RF MIXER AND DETECTOR SC
MIC280-0BM6TR
Microchip Technology
IC SUPERVISOR SOT23-6
LP5912Q1.8DRVRQ1
Texas Instruments
IC REG LINEAR 1.8V 500MA 6WSON
LM4866MTEX
Texas Instruments
AUDIO AMPLIFIER, 3.2W, 2 CHANNEL
MC78LC30HT1G
onsemi
IC REG LINEAR 3V 50MA SOT89-3
DS2731E+
Analog Devices Inc./Maxim Integrated
IC BAT PWR MGT LI-ION 1C 28TSSOP
ONET8501PBRGTR
Texas Instruments
IC LIMITING 1 CIRCUIT 16VQFN
W25Q80JVSSIQ
Winbond Electronics
IC FLASH 8MBIT SPI/QUAD 8SOIC
560125-0600
Molex
NEW 2.0 W/B CONN REC. 6 WAY ISL
GR332DD72W104KW01L
Murata Electronics
CAP CER 0.1UF 450V X7T 1210
CL05C330JB5NNNC
Samsung Electro-Mechanics
CAP CER 33PF 50V C0G/NP0 0402
LMR14020SQDPRTQ1
Texas Instruments
IC REG BUCK ADJUSTABLE 2A 10WSON -
SPC5668GK0VMG
NXP USA Inc.
IC MCU 32BIT 2MB FLASH 208MAPBGA
6N138W
onsemi
OPTOISO 2.5KV DARL W/BASE 8DIP
08055A3R0CAT2A
AVX Corporation
CAP CER 3PF 50V C0G/NP0 0805
BF420-AP
Micro Commercial Co
TRANS NPN 300V 0.1A TO92
SMLJ14CA
Bourns Inc.
TVS DIODE 14VWM 23.2VC SMC
VI-JN2-EW
Vicor Corporation
DC DC CONVERTER 15V 100W
BCM5892PC0KFB266G
Broadcom Limited
SECURE PROCESSOR
TPS59603QDSGRQ1
Texas Instruments
DRIVER COMPUTING
VVZ175-12IO7
IXYS
RECT BRIDGE 3PH 167A 1200V PWSE2
TPS7B6925QDBVRQ1
Texas Instruments
IC REG LINEAR 2.5V 150MA SOT23-5
IPS80R1K4P7
Infineon Technologies
IPS80R1K4 - 800V COOLMOS N-CHANN
ASSR-402C-302E
Broadcom Limited
SSR RELAY SPST-NO 40MA 0-400V
IRG4BC10SD-LPBF
Infineon Technologies
IGBT 600V 14A 38W TO262
SM843256KA
Microchip Technology
IC CLK/FREQ SYNTH 24TSSOP
LM158APT
STMicroelectronics
IC OPAMP GP 2 CIRCUIT 8TSSOP
SB140-E3/73
Vishay General Semiconductor - Diodes Division
DIODE SCHOTTKY 40V 1A DO204AL
EP2C8F256C7N
Intel
IC FPGA 182 I/O 256FBGA
BA50BC0WT
Rohm Semiconductor
IC REG LINEAR 5V 1A TO220-5