Bộ vi điều khiển PIC18F2550: Kiến trúc, Pinout và Ứng dụng
Hướng dẫn chuyên sâu này khám phá PIC18F2550, được thiết kế để quản lý hiệu quả nhiều thiết bị ngoại vi trong khi giảm thiểu mức tiêu thụ năng lượng.Bao gồm kiến trúc, pinout, thông số kỹ thuật và một loạt các ứng dụng, bài viết này cung cấp một cái nhìn toàn diện về các tính năng và tiềm năng của nó trong thế giới tập trung vào công nghệ ngày nay.Danh mục

Tổng quan về vi điều khiển PIC18F2550
Các PIC18F2550 Trình vi điều khiển là một lựa chọn phổ biến và thân thiện với ngân sách, được hỗ trợ bởi một cộng đồng trực tuyến sôi động, làm cho nó thân thiện với người mới bắt đầu cho các dự án điện tử.Nó có 32K byte bộ nhớ flash và 24 chân I/O có thể lập trình, cho phép tương tác dễ dàng với các thiết bị khác nhau.Giao diện USB tích hợp của nó đơn giản hóa giao tiếp với máy tính, mở rộng việc sử dụng nó trong các ứng dụng điện toán khác nhau.Bộ đếm thời gian theo dõi cải thiện độ tin cậy bằng cách đặt lại hệ thống trong các lỗi, đảm bảo hoạt động trơn tru.Bộ vi điều khiển này được sử dụng rộng rãi để làm cho các tác vụ lập trình đơn giản hơn và cho phép tương tác trực tiếp với các giao thức máy tính.Tính linh hoạt của nó làm cho nó phù hợp với các dự án tự động hóa và IoT.
Chức năng vi điều khiển PIC18F2550
Bộ vi điều khiển PIC18F2550 tiến bộ hơn so với các mạch kỹ thuật số tiêu chuẩn vì nó có thể chạy các chương trình được lưu trữ trong bộ nhớ của nó.Khi bật nguồn, nó kích hoạt các hướng dẫn được lưu trong bộ nhớ flash không bay hơi của nó, cho phép nó thực hiện các tác vụ phức tạp vượt ra ngoài khả năng của các mạch cơ bản.Bộ vi điều khiển này hoạt động bằng cách tuân theo quy trình từng bước, thực hiện mã được viết bởi các lập trình viên để thực hiện các hành động cụ thể.Nó có khả năng xử lý các hướng dẫn chi tiết cho các nhiệm vụ đòi hỏi độ chính xác và độ tin cậy, đặc biệt là trong các ngành công nghiệp cần kết quả nhất quán.Không giống như các mạch kỹ thuật số đơn giản, chỉ thực hiện các tác vụ dựa trên phần cứng cố định, PIC18F2550 có thể được lập trình lại để thích ứng với các tác vụ mới thông qua các bản cập nhật phần mềm.Tính linh hoạt này làm cho nó trở thành một công cụ có giá trị trong công nghệ phát triển nhanh chóng, cho phép cải tiến liên tục và bổ sung các tính năng nâng cao.
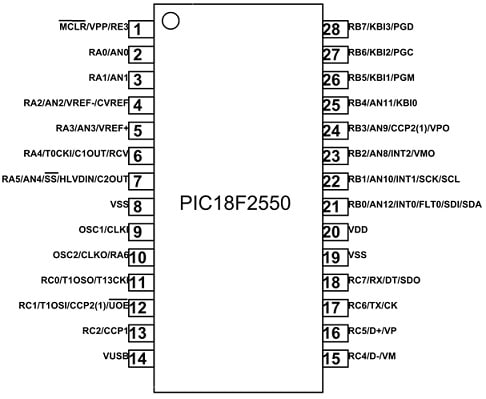
Cấu hình pin PIC18F2550
|
Số pin số |
Tên pin |
Chức năng |
|
1 |
MCLR/VPP/RE3 |
MCLR: Master Clear hoặc đặt lại đầu vào |
|
VPP: Đầu vào điện áp lập trình |
||
|
RE3: PIN I/O CỦA PORT-E |
||
|
2 |
Ra0/an0 |
RA0: I/O PIN CỦA PORT-A |
|
AN0: Đầu vào tương tự-0 |
||
|
3 |
RA1/AN1 |
RA1: I/O PIN CỦA PORT-A |
|
AN1: Đầu vào tương tự-1 |
||
|
4 |
RA2/AN2/VREF-/CVREF |
RA2: I/O PIN CỦA PORT-A |
|
AN2: Đầu vào tương tự-2 |
||
|
VREF-: Đầu vào điện áp thấp tham chiếu A/D |
||
|
CVREF: Đầu ra tham chiếu so sánh |
||
|
5 |
RA3/AN3/VREF+ |
RA3: I/O PIN CỦA PORT-A |
|
AN3: Đầu vào tương tự-3 |
||
|
VREF+: đầu vào điện áp cao tham chiếu A/D |
||
|
6 |
RA4/T0CKI/C1OUT/RCV |
RA4: I/O PIN CỦA PORT-A |
|
T0CKI: Đầu vào CLK bên ngoài Timer-0 |
||
|
C1out: Đầu ra so sánh-1 |
||
|
RCV: Đầu vào RCV bên ngoài của bộ thu phát USB |
||
|
7 |
RA5/AN4/SS/HLVDIN/C2OUT |
RA5: I/O PIN CỦA PORT-A |
|
AN4: Đầu vào tương tự-4 |
||
|
SS: SPI Slave Chọn |
||
|
HLVDIN: Đầu vào phát hiện điện áp cao/thấp |
||
|
C2out: Đầu ra so sánh-2 |
||
|
8 |
VSS |
Pin mặt đất |
|
9 |
OSC1/CLKI |
OSC1: Dao động PIN-1 |
|
CLKI: Đầu vào nguồn CLK bên ngoài |
||
|
10 |
OSC2/clko/ra6 |
OSC2: Dao động PIN-2 |
|
CLKO: CLK Nguồn đầu ra |
||
|
RA6: I/O PIN CỦA PORT-A |
||
|
11 |
RC0/T1OSO/T13CKI |
RC0: pin Port-C |
|
T1OSO: Đầu ra bộ dao động Timer-1 |
||
|
T13CKI: Đầu vào Timer1 hoặc Timer3 CLK |
||
|
12 |
RC1/T1OSI/CCP2/UOE |
RC1: pin Port-C |
|
T1OSI: Đầu vào Dao động Timer-1 |
||
|
CCP2: Capture-2/so sánh đầu ra-2/PWM2 |
||
|
UOE: đầu ra OE bên ngoài của bộ thu phát USB |
||
|
13 |
Rc2/ccp1 |
RC2: pin Port-C |
|
CCP1: Capture-1/so sánh đầu ra-1/PWM1 |
||
|
14 |
VUSB |
Bộ điều chỉnh điện áp bên trong đầu ra USB 3,3V |
|
15 |
RC4/D-/VM |
RC4: pin Port-C |
|
D-: dòng vi sai USB |
||
|
VM: VM đầu vào của bộ thu phát USB |
||
|
16 |
RC5/D+/VP |
RC5: Pin I/O của cổng-C |
|
D+: Dòng khác biệt USB cộng với dòng |
||
|
VP: Đầu vào VP của bộ thu phát USB |
||
|
17 |
RC6/TX/CK
|
RC6: pin Port-C |
|
TX: pin truyền không đồng bộ |
||
|
CK: CLK đồng bộ của Eusart |
||
|
18 |
RC7/RX/DT/SDO |
RC7: pin Port-C |
|
RX: Ghim nhận không đồng bộ |
||
|
DT: pin dữ liệu đồng bộ |
||
|
SDO: Dữ liệu SPI ra |
||
|
19 |
VSS |
Pin mặt đất |
|
20 |
Vdd |
+5V cung cấp năng lượng tích cực |
|
21 |
RB0/AN12/INT0/FLT0/SDI/SDA |
RB0: PIN I/O CỦA PORT-B |
|
AN12: Đầu vào tương tự-12 |
||
|
INT0: ngắt ngoài-0 |
||
|
FLT0: Đầu vào lỗi PWM nâng cao |
||
|
SDI: Dữ liệu SPI trong |
||
|
SDA: I2C Dữ liệu I/O |
||
|
22 |
RB1/AN10/INT1/SCK/SCL |
RB1: PIN I/O CỦA PORT-B |
|
AN10: Đầu vào tương tự-10 |
||
|
INT1: ngắt ngoài-1 |
||
|
SCK: SPI nối tiếp CLK |
||
|
SCL: I2C CLK nối tiếp |
||
|
23 |
RB2/AN8/INT2/VMO |
RB2: PIN PORT-B |
|
AN8: Đầu vào tương tự-8 |
||
|
INT2: ngắt ngoài-2 |
||
|
VMO: đầu ra VMO của bộ thu phát USB |
||
|
24 |
RB3/AN9/CCP2/VPO |
RB3: pin Port-b |
|
AN9: Đầu vào tương tự-9 |
||
|
CCP2: Capture-2/so sánh đầu ra-2/PWM2 |
||
|
VPO: đầu ra VPO của bộ thu phát USB |
||
|
25 |
RB4/AN11/KBI0 |
RB4: Pin của Port-B |
|
AN11: Đầu vào tương tự-11 |
||
|
KBI0: Ngắt trên thay đổi |
||
|
26 |
RB5/KBI1/PGM |
RB5: Pin của Port-B |
|
KBI1: Ngắt trên thay đổi |
||
|
PGM: Kích hoạt lập trình ICSP điện áp thấp |
||
|
27 |
RB6/KBI2/PGC |
RB6: PIN I/O CỦA PORT-B |
|
KBI2: Ngắt trên thay đổi |
||
|
PGC: PIN CLK lập trình ICSP |
||
|
28 |
RB7/KBI3/PGD |
RB7: pin Port-b |
|
KBI3: Ngắt trên thay đổi |
||
|
PGD: PIN dữ liệu lập trình ICSP |
Các tính năng và thông số kỹ thuật của PIC18F2550
|
Tính năng/đặc điểm kỹ thuật |
Sự miêu tả |
|
Số lượng ghim |
28 pin |
|
Điện áp hoạt động |
+4.0 đến +5.5V |
|
Loại CPU |
8 bit |
|
Ghim I/O có thể lập trình |
24 |
|
Giao diện giao tiếp |
Giao diện nối tiếp USB (chân 15, 16), Master/Slave SPI
.
22) |
|
Quầy |
Bộ đếm 1 x 8 bit, quầy 3 x 16 bit |
|
Mô -đun ADC |
10 kênh, độ phân giải 10 bit |
|
Kênh PWM |
2 |
|
So sánh tương tự |
2 |
|
Bộ dao động nội bộ |
32 kHz đến 8 MHz |
|
Dao động bên ngoài |
Lên đến 48 MHz |
|
Loại bộ nhớ chương trình |
Flash |
|
Chế độ tiết kiệm điện |
Đúng |
|
ĐẬP |
2 kb |
|
Bộ nhớ chương trình/bộ nhớ flash |
32 kb |
|
Bộ nhớ EEPROM |
256 byte |
|
Tốc độ CPU |
12 MIPS |
|
Đồng hồ bấm giờ |
Có thể lập trình, bao gồm bộ dao động trên chip riêng biệt |
|
Nhiệt độ hoạt động |
-40 ° C đến +85 ° C. |
Lập trình vi điều khiển PIC18F2550
Lập trình vi điều khiển PIC18F2550 bao gồm một loạt các bước đơn giản nhưng chính xác để định cấu hình phần cứng của nó và thực hiện các chức năng mong muốn.Quá trình này phụ thuộc rất nhiều vào việc sử dụng các chân đầu vào/đầu ra mục đích chung (GPIO), cho phép vi điều khiển tương tác với các thành phần bên ngoài như cảm biến, bộ truyền động hoặc các thiết bị ngoại vi khác.Bạn có thể viết chương trình bằng ngôn ngữ C hoặc hội, với mỗi cung cấp những lợi thế duy nhất.C thường được ưa thích vì tính đơn giản và khả năng đọc của nó, trong khi ngôn ngữ lắp ráp cung cấp quyền kiểm soát phần cứng lớn hơn, làm cho nó trở nên lý tưởng cho các nhiệm vụ nhạy cảm với hiệu suất cao.
Quy trình lập trình bắt đầu bằng việc viết mã trong môi trường phát triển tích hợp (IDE) hỗ trợ các bộ vi điều khiển PIC, như MPLABX hoặc Mikro C. Ngôn ngữ được chọn không chỉ ảnh hưởng đến sự dễ phát triển mà còn là hiệu suất của chương trình cuối cùng.Khi mã được viết, nó được biên dịch trong IDE.Trình biên dịch kiểm tra các lỗi trong cú pháp và logic, đảm bảo mã khớp với chức năng dự định.Nếu việc biên dịch thành công, kết quả là một tệp hex, một phiên bản nhỏ gọn, có thể đọc được của mã của bạn.
Bước tiếp theo là chuyển tệp HEX sang vi điều khiển.Điều này đòi hỏi một lập trình viên phần cứng, chẳng hạn như Pickit3, để thiết lập kết nối giữa PC của bạn và PIC18F2550.Sau khi kết nối lập trình viên, bạn sẽ sử dụng phần mềm tương thích để tải lên tệp hex, "đốt" nó vào bộ nhớ flash của vi điều khiển.Khi tải lên hoàn tất, ngắt kết nối lập trình viên và tích hợp vi điều khiển với bất kỳ thiết bị ngoại vi cần thiết nào.
Các công cụ cần thiết để lập trình
Công cụ phần mềm: Các công cụ phần mềm chính là một môi trường phát triển tích hợp (IDE) và trình biên dịch.Các lựa chọn phổ biến bao gồm Mikro C, MPLABX IDE và trình biên dịch CCS PIC.Các công cụ này không chỉ giúp ghi và biên dịch mã mà còn bao gồm các tính năng và thư viện gỡ lỗi đơn giản hóa làm việc với các thiết bị ngoại vi của vi điều khiển.Các thư viện tích hợp rất hữu ích để xử lý các chức năng nâng cao như chuyển đổi tương tự sang kỹ thuật số (ADC) hoặc quản lý các giao thức truyền thông như I2C hoặc SPI.
Công cụ phần cứng: Một lập trình viên phần cứng, chẳng hạn như Pickit3, được yêu cầu để chuyển tệp HEX được biên dịch từ máy tính của bạn sang vi điều khiển.Thiết bị này hoạt động như một cầu nối giữa môi trường phát triển của bạn và bộ nhớ flash PIC18F2550.Mặc dù không được yêu cầu nghiêm ngặt, các bảng phát triển PIC có thể hợp lý hóa quá trình lập trình và thử nghiệm.Các bảng này được trang bị các đầu nối GPIO, ADC và thậm chí các cảm biến được cài đặt sẵn, cung cấp một nền tảng thuận tiện để thử nghiệm và kiểm tra mã của bạn.Họ giúp dễ dàng chuyển từ mã hóa trong bối cảnh lý thuyết sang các ứng dụng thực tế với dữ liệu thời gian và các thiết bị bên ngoài.
Kiến trúc của bộ vi điều khiển PIC18F2550
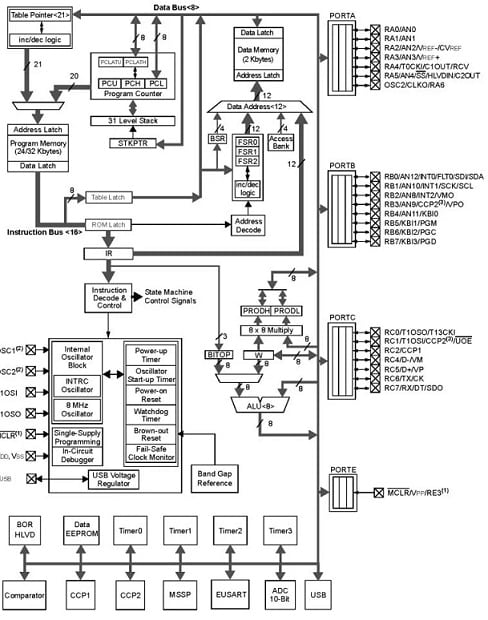
PIC18F2550 là một bộ vi điều khiển đa năng được thiết kế cho các ứng dụng kỹ thuật số hiện đại.Nó có bốn cổng GPIO (Port-A, Port-B, Port-C và Port-E), mỗi cổng có khả năng xử lý nhiều nhiệm vụ đầu vào và đầu ra.Các cổng A và B là lý tưởng cho logic TTL tiêu chuẩn, thường được sử dụng trong các mạch kỹ thuật số, trong khi Port-C hỗ trợ logic ST cho hiệu suất cao hơn.Các cổng này, với các chân được dán nhãn RA0 đến RC7, cung cấp tính linh hoạt cho các tác vụ từ điều khiển LED cơ bản đến các giao thức giao tiếp phức tạp, làm cho vi điều khiển có thể thích ứng với các hệ thống khác nhau.
Đầu vào kỹ thuật số và xử lý gián đoạn
PIC18F2550 được xây dựng để xử lý đầu vào kỹ thuật số đáp ứng, hỗ trợ cả đầu vào logic TTL và ST trên các cổng khác nhau.Khả năng tương thích này đảm bảo tích hợp trơn tru với nhiều thiết bị khác nhau và giảm độ phức tạp về thiết kế.Hệ thống ngắt của nó cho phép vi điều khiển nhanh chóng phản ứng với các sự kiện bên ngoài.Với ba vectơ ngắt bên ngoài (INT0, INT1 và INT2), nó xử lý hiệu quả các tác vụ thời gian, chẳng hạn như tự động hóa hoặc robot, mà không làm quá tải bộ xử lý.
Tùy chọn giao tiếp nối tiếp
Bộ vi điều khiển này cung cấp các khả năng giao tiếp nối tiếp mạnh mẽ, bao gồm các giao diện EUSART, SPI và I2C.Giao diện Eusart xử lý cả gửi và nhận dữ liệu, đảm bảo giao tiếp đáng tin cậy với các thiết bị khác.SPI được tối ưu hóa để trao đổi dữ liệu nhanh, ngắn, trong khi I2C cho phép giao tiếp đa thiết bị hiệu quả chỉ trên hai dây.Các tính năng này làm cho PIC18F2550 phù hợp cho cả các thiết lập đơn giản và phức tạp yêu cầu truyền dữ liệu đáng tin cậy.
Lập trình và kết nối USB
PIC18F2550 đơn giản hóa lập trình và kết nối với ICSP (lập trình nối tiếp trong mạch) và giao diện USB.ICSP cho phép cập nhật phần sụn trực tiếp mà không cần tháo chip, sử dụng sáu chân chuyên dụng để lập trình không có lỗi.Giao diện USB của nó hỗ trợ cả hoạt động nửa tốc độ và tốc độ đầy đủ, cung cấp kết nối linh hoạt cho một loạt các ứng dụng.Sự kết hợp này làm cho các bản cập nhật phần mềm và thiết kế hệ thống dựa trên USB đơn giản và hiệu quả.
Bộ hẹn giờ và các tính năng nâng cao
Bộ vi điều khiển bao gồm bốn bộ hẹn giờ, ADC 10 kênh, các bộ so sánh và mô-đun PWM để mở rộng chức năng của nó.Bộ hẹn giờ xử lý mọi thứ, từ thời gian cơ bản đến các nhiệm vụ điều khiển nâng cao như quản lý động cơ.ADC chuyển đổi tín hiệu tương tự thành dữ liệu kỹ thuật số, làm cho nó cần thiết cho các ứng dụng cảm biến.Các bộ so sánh và các mô -đun PWM tăng cường hơn nữa kiểm soát, cho phép xử lý tín hiệu chính xác và quản lý thiết bị.
Giao thoa bộ vi điều khiển PIC18F2550 với LDR
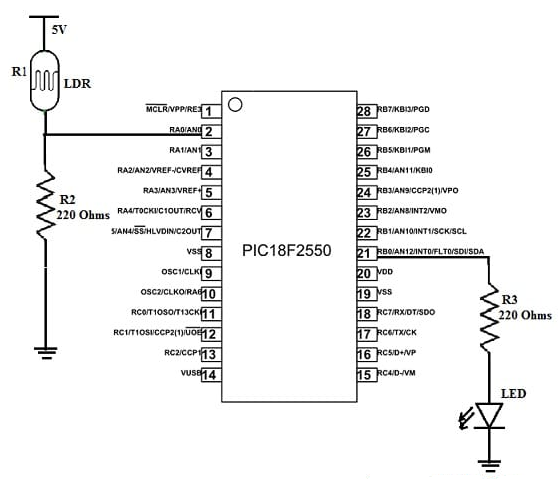
Bộ vi điều khiển PIC18F2550 tích hợp liền mạch với điện trở phụ thuộc ánh sáng (LDR) để cho phép các mạch phản ứng ánh sáng.Sử dụng bộ chuyển đổi chuyển đổi tương tự sang số (ADC) và chức năng đầu vào/đầu ra mục đích chung (GPIO), các hệ thống vi điều khiển phản ứng với các thay đổi cường độ ánh sáng, chẳng hạn như ánh sáng tự động và các ứng dụng sáng tạo khác.Để kết nối LDR với PIC18F2550, điện trở được liên kết với một trong các chân đầu vào tương tự của vi điều khiển.Điều này cho phép ADC phát hiện các biến thể điện trở do thay đổi mức độ ánh sáng.Ví dụ, khi cường độ ánh sáng tăng hoặc giảm, điện áp trên các dịch chuyển LDR và vi điều khiển chuyển các thay đổi này thành dữ liệu kỹ thuật số.Lựa chọn đúng và định vị điện trở là cần thiết để đạt được cả độ nhạy và độ ổn định.
Khi LDR được kết nối, hãy tinh chỉnh các cài đặt ADC đảm bảo các bài đọc chính xác.Điều chỉnh độ phân giải và điện áp tham chiếu giúp hệ thống cung cấp kết quả đáng tin cậy.Hiệu chuẩn thực nghiệm, trong đó hệ thống được kiểm tra trong các điều kiện ánh sáng khác nhau, tăng cường hơn nữa độ chính xác.Các bước này đảm bảo vi điều khiển diễn giải chính xác các thay đổi cường độ ánh sáng, cải thiện khả năng xử lý các môi trường khác nhau.Sự kết hợp của LDR và PIC18F2550 mở ra nhiều ứng dụng.Ngoài ánh sáng tự động, thiết lập này có thể điều khiển các hệ thống như rèm thông minh, báo động nhạy cảm với ánh sáng hoặc điều khiển độ sáng hiển thị thích ứng.Khi các công nghệ vi điều khiển và cảm biến tiếp tục phát triển, họ cung cấp các cơ hội mới để tạo ra các hệ thống phù hợp với nhu cầu của bạn, tăng cường cách công nghệ tương tác với ánh sáng tự nhiên và cuộc sống hàng ngày.
Ưu điểm và nhược điểm của PIC18F2550
Thuận lợi
• Hiệu suất cao: Cung cấp hiệu quả tính toán ấn tượng, lý tưởng cho nhiều người dùng.
• Giá cả phải chăng: Cung cấp các giải pháp hiệu quả về chi phí.
• TỐT: Đảm bảo hoạt động đáng tin cậy ngay cả trong môi trường đầy thách thức.
• Giao diện đa năng: Bao gồm USB và UART, cho phép tích hợp dễ dàng và trao đổi dữ liệu thường xuyên.
• RAM dồi dào: Xử lý các bộ dữ liệu lớn một cách hiệu quả, lý tưởng cho các hệ thống ghi dữ liệu và kiểm soát dữ liệu.
Bất lợi
• Bộ nhớ hạn chế: Yêu cầu lập trình sáng tạo để tối ưu hóa việc sử dụng tài nguyên.
• Xử lý ngắt cơ bản: Thử thách cho các ứng dụng cần thời gian chính xác hoặc phản hồi ngay lập tức.
• Tính khả thi cụ thể của dự án: Hạn chế đòi hỏi đánh giá cẩn thận để đảm bảo khả năng tương thích với các yêu cầu của dự án.
Các ứng dụng vi điều khiển PIC18F2550
Tính linh hoạt trong kỷ nguyên đương đại
PIC18F2550 tự hào có một bộ tính năng cho vay các ứng dụng tiên phong trong một loạt các ngành công nghiệp như phát triển ngoại vi USB, tự động hóa công nghiệp, điện tử, công nghệ y tế và các lĩnh vực IoT đang phát triển.
Phát triển ngoại vi USB
Với giao diện USB tích hợp, tích hợp vào các thiết bị yêu cầu kết nối USB ổn định trở nên đơn giản.Khi sự thèm ăn cho giao tiếp thiết bị liền mạch tiếp tục tăng lên, PIC18F2550 cung cấp một con đường hiệu quả.
Tự động hóa công nghiệp
Khi nói đến tự động hóa công nghiệp, vi điều khiển vượt trội bằng cách tăng cường hiệu quả của máy và tạo điều kiện chính xác trong các hoạt động phức tạp.Khả năng được tùy chỉnh của nó đảm bảo các giải pháp phù hợp cho các yêu cầu công nghiệp, nhấn mạnh các lớp đổi mới có trong các cảnh quan công nghiệp ngày nay.
Điện tử
Quỹ đạo của thiết bị điện tử là hướng tới đòi hỏi nhiều trải nghiệm trực quan và tương tác hơn.Phục vụ cho các thiết bị đòi hỏi phải xử lý thời gian và kết nối, bộ vi điều khiển này đóng vai trò là yếu tố cốt lõi trong việc tự động hóa các thiết bị và làm phong phú các tương tác với các công nghệ hàng ngày.
Thiết bị y tế
Độ chính xác trong việc thiết kế các thiết bị y tế thường dựa vào các bạn đồng hành công nghệ đáng tin cậy như PIC18F2550.Sự cống hiến của nó cho chính xác hỗ trợ việc tạo ra các vai trò thực hiện thiết bị và góp phần vào việc chăm sóc bệnh nhân và thành công hoạt động.
Ứng dụng IoT
Trong Internet of Things, nơi kết nối xác định cảnh quan, các thiết bị được nhúng đang liên tục.Sự lão luyện của vi điều khiển trong việc quản lý các nhu cầu này dự báo một kỷ nguyên trong đó các giải pháp IoT hiệu quả cách mạng hóa các tương tác môi trường, thúc đẩy sự phát triển của các mạng lưới gắn kết hơn.
Về chúng tôi
ALLELCO LIMITED
Đọc thêm
Yêu cầu nhanh chóng
Vui lòng gửi một yêu cầu, chúng tôi sẽ trả lời ngay lập tức.

Hướng dẫn về bộ khuếch đại vận hành MOSFET CA3130
trên 2024/12/17
BC557 Transitor: Tính năng, Pinout và ứng dụng
trên 2024/12/17
Bài viết phổ biến
-

Máy tính đặt hướng dẫn phức tạp: Làm thế nào họ thay đổi điện toán?
trên 8000/04/18 147749
-

Pinout và tính năng USB-C
trên 2000/04/18 111894
-
Sử dụng các nguyên thủy mô phỏng hợp nhất xilinx: Hướng dẫn toàn diện về thiết kế và mô phỏng FPGA
trên 1600/04/18 111349
-
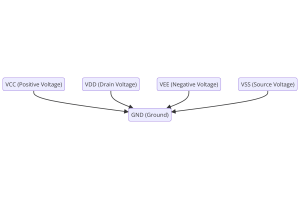
Điện áp nguồn trong điện tử: Ý nghĩa của VCC, VDD, VEE, VSS và GND
trên 0400/04/18 83713
-

Hướng dẫn kết nối RJ45: Pinout, hệ thống dây điện, loại cáp và sử dụng
trên 1970/01/1 79502
-
Hướng dẫn cuối cùng về mã màu dây trong các hệ thống điện hiện đại
Cách hệ thống điện của chúng tôi sử dụng màu sắc không chỉ dành cho ngoại hình.Mỗi màu dây hiện chỉ ra một chức năng cụ thể, giúp xác định và xử lý các thành phần điện một cách dễ dàng hơn trong qu...trên 1970/01/1 66866
-
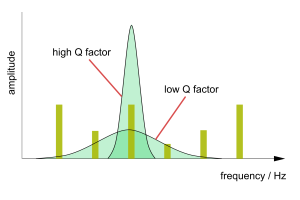
Chất lượng (Q) Yếu tố: Phương trình và ứng dụng
Yếu tố chất lượng, hoặc 'Q', rất quan trọng khi kiểm tra mức độ cuộn cảm và bộ cộng hưởng hoạt động tốt trong các hệ thống điện tử sử dụng tần số vô tuyến (RF).'Q' đo lường mức độ một mạch giảm thi...trên 1970/01/1 63002
-

Hướng dẫn van thanh lọc: Chức năng, triệu chứng, xét nghiệm và thay thế cho hiệu suất động cơ tối ưu
Van thanh lọc là một phần quan trọng của hệ thống xe hơi giúp giữ cho không khí sạch bằng cách quản lý hơi nhiên liệu trước khi chúng có thể thoát vào khí quyển.Điều này không chỉ giúp môi trường b...trên 1970/01/1 62930
-
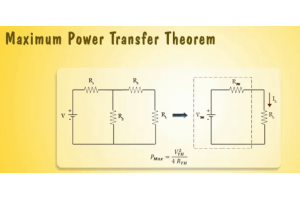
Đạt được hiệu suất cao nhất với Định lý Truyền công suất tối đa
Định lý truyền năng lượng tối đa giải thích cách năng lượng từ một nguồn, chẳng hạn như pin hoặc máy phát, chảy đến tải được kết nối.Nó cho thấy điều kiện chính xác trong đó tải nhận được nhiều năn...trên 1970/01/1 54073
-

Thông số kỹ thuật và khả năng tương thích của pin A23
Pin A23 là một pin nhỏ, hình xi lanh với điện áp cao.Cũng được gọi là 23A, 23AE hoặc MN21, nó chạy ở mức 12 volt và cao hơn nhiều so với pin AA hoặc AAA.Thiết kế đặc biệt của nó làm cho nó...trên 1970/01/1 52087
Số phần nóng
-

MAX208ECNG+
Analog Devices Inc./Maxim Integrated
IC TRANSCEIVER FULL 4/4 24DIP
ADP5022ACBZ-4-R7
Analog Devices Inc.
IC REG TRPL BCK/LNR SYNC 16WLCSP
DS1217A-64K-25
Analog Devices Inc./Maxim Integrated
MODULE NVRAM 8KB 250NS CARTRIDGE
AD5744RCSUZ
Analog Devices Inc.
IC DAC 14BIT V-OUT 32TQFP
TLC7528CNS
Texas Instruments
IC DAC 8BIT A-OUT 20SO
06035A910JAT2A
KYOCERA AVX
CAP CER 91PF 50V NP0 0603
FAN4800AUN
onsemi
IC PFC CTR AV CURR 268KHZ 16DIP
RR264MM-400TR
Rohm Semiconductor
DIODE GEN PURP 400V 1A PMDU
TMP106YZCT
Texas Instruments
SENSOR DIGITAL -40C-125C 6DSBGA
MCT06030C1002FP500
Electro-Films (EFI) / Vishay
RES SMD 10K OHM 1% 1/8W 0603
DMN6068LK3Q-13
Diodes Incorporated
MOSFET BVDSS: 41V 60V TO252
ADS7845E/2K5G4
Texas Instruments
IC SCREEN CNTRL 12BIT 16SSOP
XC4005E-3PQ100I
AMD
IC FPGA 77 I/O 100QFP
1812HC821KAT3A\SB
KYOCERA AVX
CAP CER 820PF 3KV X7R 1812
NRVTS12100PFST3G
onsemi
DIODE SCHOTTKY 100V 12A TO277-3
6N135-500E
Broadcom Limited
OPTOISO 3.75KV TRANS W/BASE 8SMD
MAX333AEUP+T
Analog Devices Inc./Maxim Integrated
IC SWITCH SPDT X 4 45OHM 20TSSOP
LFB212G45CG1C187
Murata Electronics
RF-D -

SC1565IST18TRT
Semtech Corporation
IC REG LINEAR 1.8V 1.5A SOT223-3
AD5220BN10
Analog Devices Inc.
IC POT DGTL 10K 128POS 8-DIP
LM2904AVQPWRG4
Texas Instruments
IC OPAMP GP 2 CIRCUIT 8TSSOP
BTF3125EJXUMA1
Infineon Technologies
IC PWR SWITCH N-CHAN 1:1 TDSO-8
744773115
Würth Elektronik
FIXED IND 15UH 1.2A 235 MOHM SMD
LP2981AIM5X-2.9
Texas Instruments
IC REG LINEAR FIXED LDO REG
1808SC102MAJ1A
KYOCERA AVX
CAP CER 1000PF 1.5KV X7R 1808
DS89C420-MNL
Analog Devices Inc./Maxim Integrated
IC MCU 8BIT 16KB FLASH 40DIP
STP16DPS05MTR
STMicroelectronics
IC LED DRIVER LINEAR 100MA 24SO
VC060305A150DP
KYOCERA AVX
VARISTOR 8.5V 30A 0603
CSD16410Q5A
Texas Instruments
MOSFET N-CH 25V 16A/59A 8VSON
HAL1000UT-K
TDK-Micronas GmbH
MAGNETIC SWITCH PROG TO92UT
SI1403BDL-T1-GE3
Vishay Siliconix
MOSFET P-CH 20V 1.5A SC70-6
AD7999YRJZ-1500RL7
Analog Devices Inc.
IC ADC 8BIT SAR SOT23-8
EP2A15B724C7
Intel
IC FPGA 492 I/O 724BGA
SN74AHC138RGYR
Texas Instruments
IC DECODER/DEMUX 1X3:8 16VQFN
PIC16F627A-I/SS
Microchip Technology
IC MCU 8BIT 1.75KB FLASH 20SSOP
MAX98307ETE+T
Analog Devices Inc./Maxim Integrated
IC AMP CLASS DG MONO 3.3W 16TQFN -

AOB290L
Alpha & Omega Semiconductor Inc.
MOSFET N-CH 100V 18A/140A TO263
MAX13433EETD+T
Analog Devices Inc./Maxim Integrated
IC TRANSCEIVER FULL 1/1 14TDFN
SN74LVC112ADR
Texas Instruments
IC FF JK TYPE DUAL 1BIT 16SOIC
ATSAM4SD32BA-MU
Microchip Technology
IC MCU 32BIT 2MB FLASH 64QFN
CL31A106KPHNNNF
Samsung Electro-Mechanics
CAP CER 10UF 10V X5R 1206
SOLC-120-02-F-Q-A
Samtec Inc.
CONN RCPT 80POS 0.05 GOLD SMD
UPW1J101MPD
Nichicon
CAP ALUM 100UF 20% 63V RADIAL
CS5532-BSZR
Cirrus Logic Inc.
IC ADC 24BIT SIGMA-DELTA 20SSOP
CC0603GRNPO9BN120
YAGEO
CAP CER 12PF 50V C0G/NPO 0603
S-812C50AMC-C3ET2G
ABLIC Inc.
IC REG LINEAR 5V 75MA SOT23-5
C3216X8R1H684M160AE
TDK Corporation
CAP CER 0.68UF 50V X8R 1206
CY2309NZSC-1HT
Cypress Semiconductor Corp
IC CLK BUF 1:9 133.3MHZ 16SOIC
FDD6632
Fairchild Semiconductor
MOSFET N-CH 30V 9A DPAK
GCM155R71E473KA55D
Murata Electronics
CAP CER 0.047UF 25V X7R 0402
LM2743MTCX
Texas Instruments
IC REG CTRLR BUCK 14TSSOP
7440650047
Würth Elektronik
FIXED IND 4.7UH 4.6A 23 MOHM SMD
SS2P4HM3/84A
Vishay General Semiconductor - Diodes Division
DIODE SCHOTTKY 40V 2A DO220AA
V24C12H100BS
Vicor Corporation
DC DC CONVERTER 12V 100W