Hệ thống vòng lặp mở và vòng kín: Sự khác biệt chính, hoạt động, ưu điểm và ứng dụng
Hệ thống vòng lặp mở và vòng kín giải thích cách hệ thống phản hồi khi bạn cung cấp đầu vào cho nó.Trong bài viết này, bạn sẽ tìm hiểu chức năng của từng hệ thống, cách thức hoạt động và lý do tại sao phản hồi lại quan trọng trong việc kiểm soát kết quả.Bạn cũng sẽ thấy các thành phần và ứng dụng của chúng khác nhau như thế nào.Điều này giúp bạn dễ dàng hiểu được nơi mỗi hệ thống thường được sử dụng.Danh mục
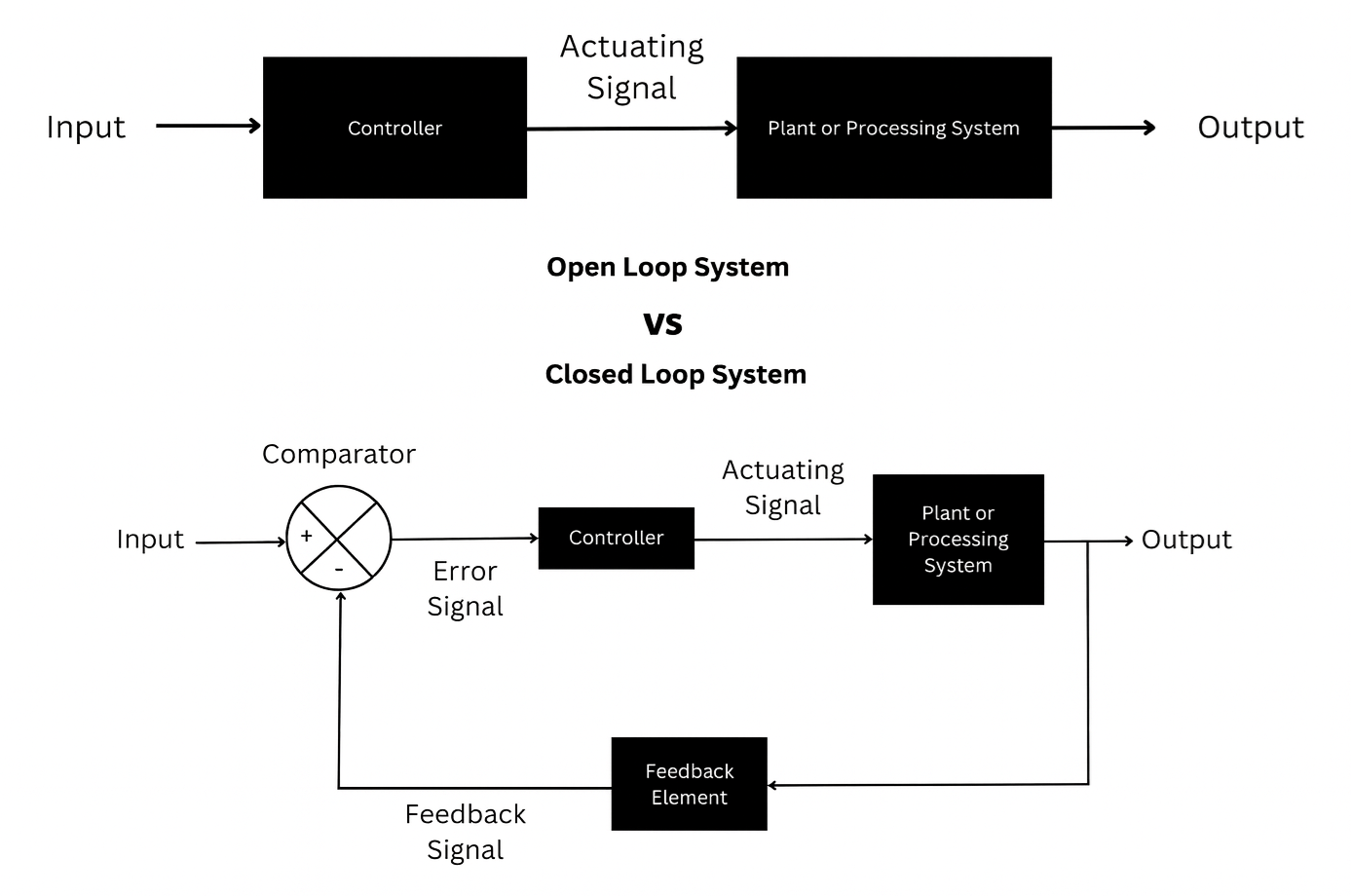
Hình 1. Hệ thống vòng lặp mở và vòng kín
Hệ thống vòng lặp mở là gì?
Hệ thống vòng hở là một loại hệ thống điều khiển trong đó đầu ra không được giám sát hoặc so sánh với đầu vào.Hành động điều khiển chỉ được áp dụng dựa trên đầu vào nhất định mà không xem xét kết quả thực tế do hệ thống tạo ra.Do không có cơ chế phản hồi nên hệ thống không thể tự phát hiện hoặc sửa lỗi.Bất kỳ sự thay đổi hoặc xáo trộn nào đều ảnh hưởng trực tiếp đến đầu ra mà không cần điều chỉnh.Hoạt động của hệ thống phụ thuộc hoàn toàn vào các cài đặt hoặc hiệu chỉnh được xác định trước.Hệ thống điều khiển vòng hở thường được xác định bởi tính đơn giản và thiếu khả năng sửa lỗi tự động.
Hệ thống vòng kín là gì?
Hệ thống vòng kín là một hệ thống điều khiển liên tục so sánh đầu ra thực tế với đầu vào mong muốn bằng cách sử dụng phản hồi.Sự khác biệt giữa đầu vào và đầu ra, được gọi là tín hiệu lỗi, xác định hành động điều khiển.Sự so sánh dựa trên phản hồi này cho phép hệ thống tự động phản hồi với những sai lệch.Bộ điều khiển điều chỉnh đầu ra của nó để giảm hoặc loại bỏ lỗi.Kết quả là hệ thống duy trì sự liên kết chặt chẽ hơn với hiệu suất mong muốn.Các hệ thống vòng kín được xác định bởi khả năng tự điều chỉnh thông qua phản hồi.
Các thành phần của hệ thống vòng lặp mở và vòng kín
|
thành phần |
Vòng lặp mở
Hệ thống |
Đã đóng
Hệ thống vòng lặp |
|
Đầu vào /
Tín hiệu tham chiếu |
Sử dụng một đầu vào
để bắt đầu hoạt động, nhưng nó không được so sánh với đầu ra. |
Sử dụng một đầu vào
được so sánh liên tục với sản lượng thực tế. |
|
Bộ điều khiển |
Gửi một bản sửa lỗi
hành động điều khiển chỉ dựa trên đầu vào. |
điều chỉnh
điều khiển hành động liên tục dựa trên phản hồi. |
|
Thiết bị truyền động /
Phần tử điều khiển |
vận hành
theo lệnh của người điều khiển mà không cần xác minh. |
Sửa đổi nó
hành động dựa trên phản hồi từ hệ thống. |
|
Đầu ra /
Quy trình |
Đầu ra là
được tạo ra nhưng không được đo lường hoặc sửa chữa. |
Đầu ra là
theo dõi và hiệu chỉnh để đạt được giá trị mong muốn. |
|
Cảm biến /
Thiết bị đo |
Không có cảm biến
dùng để đo sản lượng. |
Cảm biến
đo đầu ra và gửi dữ liệu đến bộ điều khiển. |
|
Phản hồi
Đường dẫn/Bộ so sánh |
Không có phản hồi
so sánh đường dẫn hoặc lỗi. |
Đường dẫn phản hồi
và bộ so sánh là cần thiết để phát hiện lỗi. |
Hệ thống vòng lặp mở và vòng kín hoạt động như thế nào?
Hệ thống vòng lặp mở

Hình 2. Sơ đồ khối của hệ thống vòng hở
Hệ thống vòng hở hoạt động bằng cách xử lý tín hiệu đầu vào mà không kiểm tra kết quả đầu ra.Như thể hiện trong hình, đầu vào được cấp trực tiếp vào bộ điều khiển, tạo ra tín hiệu kích hoạt.Tín hiệu kích hoạt này được gửi đến nhà máy hoặc hệ thống xử lý để tạo ra đầu ra.Đầu ra chỉ di chuyển về phía trước và không được trả về bộ điều khiển dưới bất kỳ hình thức nào.Vì không có đường phản hồi nên bộ điều khiển không có thông tin về đầu ra thực tế.Hệ thống hoàn tất hoạt động sau khi đầu ra được tạo ra, bất kể nó có khớp với kết quả dự kiến hay không.
Hệ thống vòng kín
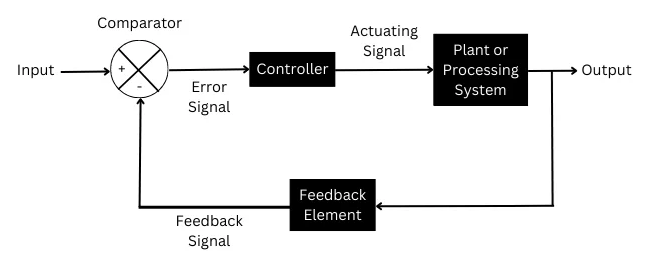
Hình 3. Sơ đồ khối của hệ thống vòng kín
Hệ thống vòng kín hoạt động bằng cách liên tục so sánh đầu ra với đầu vào để kiểm soát phản hồi của hệ thống.Trong hình, đầu vào trước tiên được gửi đến bộ so sánh, tại đó nó được so sánh với tín hiệu phản hồi từ đầu ra.Bộ so sánh này tạo ra tín hiệu lỗi thể hiện sự khác biệt giữa đầu vào mong muốn và đầu ra thực tế.Tín hiệu lỗi sau đó được gửi đến bộ điều khiển, tạo ra tín hiệu kích hoạt thích hợp.Tín hiệu kích hoạt này điều khiển nhà máy hoặc hệ thống xử lý tạo ra đầu ra.Đầu ra được đưa trở lại thông qua phần tử phản hồi tới bộ so sánh, tạo thành một vòng lặp hoàn chỉnh cho phép điều chỉnh liên tục.
Các ứng dụng của hệ thống vòng lặp mở và vòng kín
|
ứng dụng
Khu vực |
Vòng lặp mở
Hệ thống |
Đã đóng
Hệ thống vòng lặp |
|
hộ gia đình
Thiết bị gia dụng |
giặt
máy (dựa trên bộ đếm thời gian): Hoạt động trong một thời gian cố định mà không kiểm tra đầu ra. |
Máy điều nhiệt
trong máy điều hòa không khí và tủ lạnh: Điều chỉnh nhiệt độ bằng phản hồi. |
|
Sưởi ấm và
nấu ăn |
lò vi sóng
lò nướng (kiểm soát thời gian): Việc sưởi ấm chỉ phụ thuộc vào thời gian đặt trước. |
Kiểm soát nhiệt độ
lò nướng: Điều chỉnh nhiệt bằng cảm biến. |
|
Giao thông và
Giao thông vận tải |
Thời gian cố định
đèn giao thông: Thay đổi tín hiệu dựa trên thời gian đặt trước. |
hành trình
Hệ thống điều khiển: Duy trì tốc độ xe bằng phản hồi. |
|
công nghiệp
Máy móc |
băng tải
đai: Chạy ở tốc độ không đổi mà không cần giám sát tải. |
công nghiệp
Kiểm soát tốc độ động cơ: Duy trì tốc độ dưới các tải khác nhau. |
|
Quyền lực và
Hệ thống điện |
Pin cơ bản
bộ sạc: Cung cấp điện áp hoặc dòng điện cố định. |
tự động
bộ điều chỉnh điện áp (AVR): Duy trì điện áp đầu ra ổn định. |
|
Tự động hóa
và Kiểm soát |
Dựa trên bộ đếm thời gian
hệ thống tưới tiêu: Vận hành trong khoảng thời gian định trước. |
dựa trên PLC
Hệ thống điều khiển quá trình: Điều chỉnh hoạt động bằng cách sử dụng phản hồi của cảm biến. |
|
Robot và
Điều khiển chuyển động |
Đơn giản
máy lặp đi lặp lại: Thực hiện các chuyển động cố định. |
Động cơ servo
và cánh tay robot: Kiểm soát vị trí và tốc độ một cách chính xác. |
|
Chất lỏng và
Kiểm soát mức độ |
Nước thủ công
máy bơm: Vận hành mà không có cảm biến mức. |
tự động
Bộ điều khiển mực nước: Khởi động và dừng máy bơm dựa trên phản hồi. |
Ưu điểm của hệ thống vòng mở và vòng kín
Ưu điểm của hệ thống vòng lặp mở
• Thiết kế đơn giản, dễ hiểu
• Chi phí thấp do ít linh kiện hơn
• Thời gian phản hồi nhanh
• Dễ dàng xây dựng và bảo trì
• Không cần cảm biến hoặc phần tử phản hồi
• Hoạt động ổn định không có dao động do phản hồi gây ra
• Lý tưởng cho các điều kiện vận hành cố định và có thể dự đoán được
Ưu điểm của hệ thống vòng kín
• Độ chính xác cao thông qua phản hồi liên tục
• Tự động phát hiện và sửa lỗi
• Ít bị ảnh hưởng bởi nhiễu loạn bên ngoài
• Hiệu suất tốt hơn trong các điều kiện tải khác nhau
• Cải thiện độ tin cậy và tính nhất quán
• Khả năng ổn định các quá trình không ổn định
• Thích hợp cho các ứng dụng phức tạp và đòi hỏi độ chính xác cao
Nhược điểm của hệ thống vòng mở và vòng kín
Nhược điểm của hệ thống vòng lặp mở
• Không có phản hồi nên không thể sửa lỗi
• Độ chính xác thấp hơn hệ thống vòng kín
• Rất nhạy cảm với nhiễu loạn và thay đổi thông số
• Đầu ra phụ thuộc hoàn toàn vào hiệu chuẩn
• Khả năng thích ứng kém với các điều kiện thay đổi
• Không phù hợp để điều khiển phức tạp hoặc chính xác
Nhược điểm của hệ thống vòng kín
• Thiết kế và triển khai phức tạp hơn
• Chi phí cao hơn do cảm biến và các thành phần phản hồi
• Yêu cầu bảo trì và hiệu chuẩn thường xuyên
• Phản hồi chậm hơn do xử lý phản hồi
• Nguy cơ mất ổn định hoặc dao động nếu thiết kế kém
• Lỗi của các phần tử phản hồi có thể ảnh hưởng đến hiệu suất hệ thống
Hệ thống vòng lặp mở so với Hệ thống vòng kín
|
tham số |
Vòng lặp mở
Hệ thống |
Đã đóng
Hệ thống vòng lặp |
|
Phản hồi
sự hiện diện |
Không có phản hồi
đường dẫn được sử dụng. |
Đường dẫn phản hồi
là một phần quan trọng của hệ thống. |
|
Kiểm soát
hành động |
Kiểm soát hành động
chỉ phụ thuộc vào tín hiệu đầu vào. |
Kiểm soát
hành động phụ thuộc vào lỗi giữa đầu vào và đầu ra. |
|
Lỗi
Sửa chữa |
Lỗi không thể
được phát hiện hoặc sửa chữa tự động. |
Lỗi là
liên tục được phát hiện và sửa chữa. |
|
Độ chính xác |
Độ chính xác thấp
do không có phản hồi. |
Độ chính xác cao
do điều khiển phản hồi liên tục. |
|
Độ phức tạp |
Hệ thống đơn giản
cấu trúc và thiết kế. |
Phức tạp hơn
do cảm biến và mạch phản hồi. |
|
Sự ổn định
|
Đương nhiên
ổn định trong điều kiện cố định. |
Tính ổn định
phụ thuộc vào thiết kế phản hồi thích hợp. |
|
Thời gian đáp ứng |
Nhanh hơn
phản hồi vì không có quá trình xử lý phản hồi nào được thực hiện. |
hơi
chậm hơn do quá trình phản hồi và so sánh. |
|
Rối loạn
Xử lý |
cao
bị ảnh hưởng bởi các nhiễu loạn bên ngoài. |
Ít bị ảnh hưởng hơn
khi phản hồi bù đắp cho sự nhiễu loạn. |
|
Độ tin cậy |
Ít tin cậy hơn
khi điều kiện hoạt động thay đổi. |
Đáng tin cậy hơn
trong những điều kiện khác nhau. |
|
cảm biến
Yêu cầu |
Cảm biến là
không bắt buộc. |
Cảm biến là
cần thiết để đo lường đầu ra. |
|
Bảo trì |
Dễ dàng
duy trì do cấu trúc đơn giản. |
Yêu cầu
bảo trì và hiệu chuẩn thường xuyên. |
|
Khả năng thích ứng |
Nghèo
khả năng thích ứng với tải hoặc thay đổi môi trường. |
Cao
khả năng thích ứng với những thay đổi và xáo trộn. |
Kết luận
Hệ thống vòng mở đơn giản và chi phí thấp nhưng không thể sửa lỗi vì chúng không sử dụng phản hồi.Hệ thống vòng kín sử dụng phản hồi để điều chỉnh đầu ra, làm cho chúng chính xác và đáng tin cậy hơn.Sự khác biệt về các thành phần, hoạt động, ưu điểm và hạn chế nêu bật cách phản hồi ảnh hưởng đến hành vi của hệ thống.Việc lựa chọn giữa các hệ thống này phụ thuộc vào độ chính xác, độ phức tạp, chi phí và điều kiện vận hành cần thiết.
Về chúng tôi
ALLELCO LIMITED
Đọc thêm
Yêu cầu nhanh chóng
Vui lòng gửi một yêu cầu, chúng tôi sẽ trả lời ngay lập tức.
Các câu hỏi thường gặp [FAQ]
1. Hệ thống vòng hở có còn được sử dụng trong tự động hóa hiện đại không?
Có, hệ thống vòng lặp mở vẫn được sử dụng trong các ứng dụng đơn giản, chi phí thấp, không yêu cầu độ chính xác và phản hồi.
2. Hệ thống nào tốt hơn cho các ứng dụng điều khiển công nghiệp?
Hệ thống vòng kín tốt hơn cho điều khiển công nghiệp vì chúng xử lý được các nhiễu loạn, thay đổi tải và yêu cầu về độ chính xác.
3. Hệ thống vòng kín có luôn yêu cầu cảm biến không?
Có, cảm biến rất cần thiết trong các hệ thống vòng kín để đo lường đầu ra và cung cấp phản hồi cho bộ điều khiển.
4. Có thể chuyển đổi hệ thống vòng hở thành hệ thống vòng kín không?
Có, việc thêm cảm biến, đường phản hồi và bộ so sánh có thể chuyển đổi hệ thống vòng hở thành hệ thống vòng kín.
5. Tại sao hệ thống vòng mở nhanh hơn hệ thống vòng kín?
Hệ thống vòng mở phản hồi nhanh hơn vì không có độ trễ xử lý phản hồi hoặc so sánh.

Bộ điều khiển logic khả trình (PLC): Định nghĩa, loại, nguyên tắc làm việc và ứng dụng
trên 2025/12/15
Giải thích về bộ đếm lên/xuống: Tính năng, hoạt động, loại, cách sử dụng và so sánh bộ đếm
trên 2025/12/13
Bài viết phổ biến
-

Máy tính đặt hướng dẫn phức tạp: Làm thế nào họ thay đổi điện toán?
trên 8000/04/18 147766
-

Pinout và tính năng USB-C
trên 2000/04/18 111994
-
Sử dụng các nguyên thủy mô phỏng hợp nhất xilinx: Hướng dẫn toàn diện về thiết kế và mô phỏng FPGA
trên 1600/04/18 111351
-
Điện áp nguồn trong điện tử: Ý nghĩa của VCC, VDD, VEE, VSS và GND
trên 0400/04/18 83755
-

Hướng dẫn kết nối RJ45: Pinout, hệ thống dây điện, loại cáp và sử dụng
trên 1970/01/1 79550
-
Hướng dẫn cuối cùng về mã màu dây trong các hệ thống điện hiện đại
Cách hệ thống điện của chúng tôi sử dụng màu sắc không chỉ dành cho ngoại hình.Mỗi màu dây hiện chỉ ra một chức năng cụ thể, giúp xác định và xử lý các thành phần điện một cách dễ dàng hơn trong qu...trên 1970/01/1 66951
-

Hướng dẫn van thanh lọc: Chức năng, triệu chứng, xét nghiệm và thay thế cho hiệu suất động cơ tối ưu
Van thanh lọc là một phần quan trọng của hệ thống xe hơi giúp giữ cho không khí sạch bằng cách quản lý hơi nhiên liệu trước khi chúng có thể thoát vào khí quyển.Điều này không chỉ giúp môi trường b...trên 1970/01/1 63094
-
Chất lượng (Q) Yếu tố: Phương trình và ứng dụng
Yếu tố chất lượng, hoặc 'Q', rất quan trọng khi kiểm tra mức độ cuộn cảm và bộ cộng hưởng hoạt động tốt trong các hệ thống điện tử sử dụng tần số vô tuyến (RF).'Q' đo lường mức độ một mạch giảm thi...trên 1970/01/1 63028
-
Đạt được hiệu suất cao nhất với Định lý Truyền công suất tối đa
Định lý truyền năng lượng tối đa giải thích cách năng lượng từ một nguồn, chẳng hạn như pin hoặc máy phát, chảy đến tải được kết nối.Nó cho thấy điều kiện chính xác trong đó tải nhận được nhiều năn...trên 1970/01/1 54094
-

Thông số kỹ thuật và khả năng tương thích của pin A23
Pin A23 là một pin nhỏ, hình xi lanh với điện áp cao.Cũng được gọi là 23A, 23AE hoặc MN21, nó chạy ở mức 12 volt và cao hơn nhiều so với pin AA hoặc AAA.Thiết kế đặc biệt của nó làm cho nó...trên 1970/01/1 52176
Số phần nóng
-

CDSOD323-T08S
Bourns Inc.
TVS DIODE 8VWM 16.9VC SOD323
CSD95496QVM
Texas Instruments
IC HALF BRIDGE DRIVER 40A 18VSON
FKP2F021501L00KSSD
WIMA
CAP FILM 0.015UF 10% 250VDC RAD
USB5744/2G
Microchip Technology
IC HUB CTLR USB 56VQFN
NTS4101PT1G
onsemi
MOSFET P-CH 20V 1.37A SC70-3
1534630
Phoenix Contact
CONN RCPT FMALE 4POS GOLD SOLDER
687312124422
Würth Elektronik
CONN FPC VERT 12POS 0.5MM SMD
AD8009AR-REEL
Analog Devices Inc.
IC OPAMP CFA 1 CIRCUIT 8SOIC
MT28EW256ABA1HPC-0SIT
Micron Technology Inc.
IC FLASH 256MBIT PARALLEL 64LBGA
12102U300JAT2A
KYOCERA AVX
CAP CER 30PF 200V NP0 1210
HCF4073M013TR
STMicroelectronics
IC GATE AND 3CH 3-INP 14SO
STTH1008DTI
STMicroelectronics
DIODE HYPER 800V 10A TO-220AC
A4915METTR-T
Allegro MicroSystems
IC MOTOR DRIVER 3V-5.5V 28QFN
KRM55WR72A156MH01K
Murata Electronics
CAP CER 15UF 100V X7R SMD
GRM1885C2A7R7CA01D
Murata Electronics
CAP CER 7.7PF 100V C0G/NP0 0603
AD22105ARZ-REEL
Analog Devices Inc.
THERMOSTAT PROG ACT HIGH 8SOIC
GRM0335C1ER20BA01D
Murata Electronics
CAP CER 0.2PF 25V C0G/NP0 0201
ST-LINK/V2
STMicroelectronics
ST-LINK V2 PROG FOR STM8 STM32 -

MMSZ5237BS
Yangjie Technology
Diodes - Rectifiers - Single SOD
ADP8861ACPZ-R7
Analog Devices Inc.
IC LED DRV RGLTR I2C 20LFCSP
TL031CP
Texas Instruments
IC OPAMP JFET 1 CIRCUIT 8DIP
LP2989ILD-1.8
Texas Instruments
FIXED POSITIVE LDO REGULATOR
SN75LVCP600DRFT
Texas Instruments
IC REDRIVER SATA 1CH 6GBPS 8WDFN
CAB4AZNRR
Texas Instruments
IC DDR4 REGISTER CAB4A 253BGA
A437M
Powerex Inc.
DIODE GEN PURP 600V 600A DO200AB
SWPA252010S6R8MT
Shenzhen Sunlord Electronics Co., Ltd.
FIXED IND 6.8UH 590MA 896MOHM SM
L6227PD
STMicroelectronics
IC MTR DRV BIPOLAR 8-52V 36PWRSO
MPU-6050
TDK InvenSense
IMU ACCEL/GYRO 3-AXIS I2C 24QFN
PIC16F1705-I/ST
Microchip Technology
IC MCU 8BIT 14KB FLASH 14TSSOP
TPS7A3401DGNT
Texas Instruments
IC REG LIN NEG ADJ 200MA 8HVSSOP
06033D473KAT2A
KYOCERA AVX
CAP CER 0.047UF 25V X5R 0603
EPF10K30RC240-3N
Intel
IC FPGA 189 I/O 240RQFP
2R5TPE330MAZB
Panasonic Electronic Components
CAP TANT POLY 330UF 2.5V 1411
SCA-4-10+
Mini-Circuits
RF PWR DVDR 5MHZ-1GHZ 10SMD
IRF7341QTRPBF
Infineon Technologies
MOSFET 2N-CH 55V 5.1A 8-SOIC
ATSAMD21E16L-MNT
Microchip Technology
IC MCU 32BIT 64KB FLASH 32QFN -

D2F-01L-D3
Omron Electronics Inc-EMC Div
SWITCH SNAP ACT SPDT 100MA 30V
XRT83SL34IV-F
MaxLinear, Inc.
IC TELECOM INTERFACE 128TQFP
ADE7758ARWZ
Analog Devices Inc.
IC ENERGY METERING 3PHASE 24SOIC
GRM0335C1H8R8DD01D
Murata Electronics
CAP CER 8.8PF 50V C0G/NP0 0201
NJM2794V-TE1
Nisshinbo Micro Devices Inc.
IC OPAMP ISOLATION 2 CIRC 14SSOP
IRFB3307ZGPBF
Infineon Technologies
MOSFET N-CH 75V 120A TO220AB
V375C8E100BG
Vicor Corporation
DC DC CONVERTER 8V 100W
LFE3-95EA-7FN1156I
Lattice Semiconductor Corporation
IC FPGA 490 I/O 1156FBGA
MAX4712CSE
Analog Devices Inc./Maxim Integrated
IC SWITCH SPST-NOX4 25OHM 16SOIC
170M7059
Eaton - Bussmann Electrical Division
FUSE SQUARE 1.25KA 690V RECT
SI7322DN-T1-E3
Vishay Siliconix
MOSFET N-CH 100V 18A PPAK 1212-8
TPS2061DGNR
Texas Instruments
IC PWR SWITCH N-CHAN 1:1 8MSOP
LC4256C-75FT256AI
Lattice Semiconductor Corporation
IC CPLD 256MC 7.5NS 256FTBGA
CAT25256HU4I-GT3
onsemi
IC EEPROM 256KBIT SPI 8UDFN
MSFC130-16
Microsemi Corporation
MOD THYRISTOR DIODE DBLR 130A D1
FH52-8S-0.5SH
Hirose Electric Co Ltd
CONN FFC BOTTOM 8POS 0.5MM R/A
MMZ1005Y152CT000
TDK Corporation
FERRITE BEAD 1.5K OHM 0402 1LN
5CGTFD7D5F27I7N
Intel
IC FPGA 336 I/O 672FBGA