Cảm biến vị trí trục cam: chức năng, triệu chứng thất bại, thử nghiệm và ứng dụng
Trong những chiếc xe ngày nay, cảm biến vị trí trục cam là một phần quan trọng của động cơ.Cảm biến này giúp máy tính của xe, được gọi là Mô -đun điều khiển động cơ (ECM), đảm bảo mọi thứ trong động cơ chạy trơn tru.Nó kiểm tra xem trục cam ở đâu và nó di chuyển nhanh như thế nào, và bảo ECM điều chỉnh thời gian phân phối nhiên liệu và tia lửa.Điều này làm cho chiếc xe chạy tốt hơn, sử dụng nhiên liệu hiệu quả hơn và tạo ra ít ô nhiễm hơn.Bài viết này sẽ giải thích cảm biến vị trí trục cam làm gì, tại sao nó lại quan trọng và những gì có thể sai với nó.Danh mục

Cảm biến vị trí trục cam là gì?
Một cảm biến vị trí trục cam là một phần quan trọng của động cơ xe hơi.Nó giúp động cơ chạy trơn tru bằng cách điều khiển khi tia lửa bắn và khi nhiên liệu được bơm.Cảm biến này theo dõi mức độ nhanh của trục cam quay và vị trí của nó.Sau đó, nó gửi thông tin này đến mô -đun điều khiển động cơ (ECM), sử dụng dữ liệu để điều chỉnh thời gian động cơ để có hiệu suất tốt hơn, hiệu quả nhiên liệu và lượng khí thải thấp hơn.Cảm biến được đặt gần trục cam để nó có thể thu thập dữ liệu chính xác.Vị trí chính xác của nó phụ thuộc vào thiết kế động cơ và nhà sản xuất xe hơi.
Công việc của cảm biến là phát hiện chuyển động của trục cam mà không có bất kỳ sự can thiệp nào.Nó cũng giúp động cơ biết xi lanh nào trong đột quỵ, đảm bảo việc phun nhiên liệu và thời gian đánh lửa được đồng bộ hóa với trục khuỷu.Mặc dù cảm biến vị trí trục cam là nhỏ, nhưng nó đóng một vai trò lớn trong việc động cơ hoạt động tốt như thế nào.Nó giúp động cơ khởi động đúng, chạy hiệu quả và sử dụng nhiên liệu một cách khôn ngoan.Nếu không có cảm biến này, động cơ có thể sai, gian hàng hoặc gặp khó khăn khi bắt đầu.Điều này làm cho nó trở thành một phần chính của công nghệ xe hơi hiện đại.
Chức năng của cảm biến vị trí trục cam
Chức năng chính của cảm biến vị trí trục cam là giám sát và báo cáo vị trí chính xác và tốc độ quay của trục cam cho mô -đun điều khiển động cơ (ECM) để điều chỉnh các khía cạnh khác nhau của hoạt động động cơ.Cảm biến này liên tục thu thập dữ liệu để đảm bảo rằng ECM có thể kiểm soát chính xác thời gian phun nhiên liệu, thời gian đánh lửa và thời gian van biến đổi (VVT).Nếu không có đầu vào chính xác từ cảm biến này, ECM sẽ đấu tranh để đồng bộ hóa các chức năng này, dẫn đến đốt cháy không hiệu quả, giảm sản lượng điện và tăng mức tiêu thụ nhiên liệu.Cảm biến giúp phát hiện bất kỳ sự bất thường nào trong chuyển động của trục cam, chẳng hạn như sai lệch hoặc các vấn đề cơ học, có thể ảnh hưởng tiêu cực đến hiệu suất của động cơ tổng thể.Bằng cách xác định những mâu thuẫn này, ECM có thể điều chỉnh để duy trì hoạt động trơn tru và ngăn ngừa thiệt hại tiềm tàng cho các thành phần động cơ.
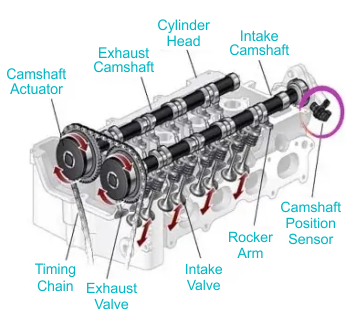
Hình 2. Sơ đồ động cơ A (DOHC) với cảm biến vị trí trục cam
Một trong những trách nhiệm chính của cảm biến vị trí trục cam là hỗ trợ thời gian chính xác của các van nạp và xả bằng cách chuyển dữ liệu đến ECM.Vì trục cam điều khiển việc mở và đóng các van này, dữ liệu cảm biến cho phép ECM xác định thời điểm chính xác cho việc phun nhiên liệu và đánh lửa tia lửa.Đồng bộ hóa này rất quan trọng vì hỗn hợp không khí nhiên liệu phải được đốt cháy tại điểm lý tưởng trong chu kỳ đốt để tối đa hóa công suất trong khi giảm thiểu nhiên liệu lãng phí và khí thải.Nếu cảm biến vị trí trục cam không thành công hoặc cung cấp dữ liệu không chính xác, động cơ có thể gặp phải sự không hoạt động thô, do dự trong quá trình tăng tốc hoặc thậm chí bị đình trệ, vì ECM sẽ không thể điều chỉnh thời gian của van một cách hiệu quả.Hơn nữa, vì trục cam quay với một nửa tốc độ của trục khuỷu, cảm biến đảm bảo rằng ECM có thể phân biệt giữa các đột quỵ và ống xả, ngăn ngừa tính toán sai thời gian có thể dẫn đến không hiệu quả động cơ.Bằng cách liên tục theo dõi các chuyển động này, cảm biến giúp duy trì hoạt động mịn và nhất quán của động cơ.
Một chức năng khác của cảm biến vị trí trục cam là vai trò của nó trong việc hỗ trợ hệ thống thời gian van (VVT) thay đổi, điều chỉnh linh hoạt thời gian van để tối ưu hóa hiệu suất trong các điều kiện lái xe khác nhau.Trong các phương tiện được trang bị công nghệ VVT, ECM dựa vào dữ liệu từ cảm biến vị trí trục cam để thay đổi thời gian van dựa trên các yếu tố như tải động cơ, tốc độ và vị trí bướm ga.Bằng cách đó, hệ thống có thể cải thiện hiệu quả nhiên liệu ở tốc độ thấp hơn trong khi tối đa hóa công suất ở tốc độ cao hơn, tạo ra sự cân bằng giữa hiệu suất và kinh tế.Bằng cách tối ưu hóa thời gian của van nạp và van xả, cảm biến góp phần phát thải thấp hơn bằng cách đảm bảo đốt cháy nhiên liệu hoàn chỉnh hơn.Các loại cảm biến vị trí trục cam khác nhau, cung cấp truyền dữ liệu chính xác và đáng tin cậy đến ECM, đảm bảo rằng các điều chỉnh được thực hiện theo thời gian của van là chính xác và đáp ứng.
Vị trí của cảm biến vị trí trục cam
Cảm biến vị trí trục cam được đặt cẩn thận trong động cơ để đảm bảo nó có thể theo dõi chính xác chuyển động của trục cam.Mặc dù vị trí chính xác của nó phụ thuộc vào mô hình và mô hình của xe, nhưng nó thường được tìm thấy gần đầu xi lanh, được gắn vào nắp thời gian hoặc được gắn trên khối động cơ.Định vị chiến lược này cho phép cảm biến thu thập dữ liệu quay chính xác từ trục cam để điều chỉnh thời gian động cơ.Bằng cách liên tục theo dõi chuyển động của trục cam, cảm biến giúp đảm bảo rằng động cơ hoạt động trơn tru và hiệu quả.Nếu không có cảm biến được định vị đúng, mô -đun điều khiển động cơ (ECM) sẽ không nhận được dữ liệu để điều chỉnh thời gian đánh lửa và phun nhiên liệu chính xác.
Hình 3. Vị trí của cảm biến vị trí trục cam
Trong một số động cơ, cảm biến vị trí trục cam được ẩn đằng sau nắp thời gian, khiến nó trở nên khó khăn hơn khi truy cập.Tiếp cận cảm biến trong những trường hợp này có thể yêu cầu các bước bổ sung, chẳng hạn như tháo nắp hoặc các thành phần khác gần đó.Mặc dù có thêm nỗ lực cần thiết để truy cập, vị trí này rất quan trọng vì nó cho phép cảm biến phát hiện các thay đổi ở vị trí trục cam.ECM dựa vào dữ liệu này để điều chỉnh liên tục để cải thiện hiệu suất động cơ, hiệu quả nhiên liệu và khả năng lái xe tổng thể.Vị trí đúng của cảm biến đảm bảo động cơ hoạt động tốt nhất, làm giảm nguy cơ sai lệch hoặc các vấn đề hiệu suất có thể phát sinh từ thời gian không chính xác.
Cảm biến vị trí trục cam hoạt động như thế nào?
Các chức năng cảm biến vị trí trục cam bằng cách phát hiện vòng quay của trục cam và chuyển đổi chuyển động này thành tín hiệu điện tử.Các tín hiệu này sau đó được gửi đến mô -đun điều khiển động cơ (ECM), sử dụng dữ liệu để điều chỉnh thời gian động cơ và các hoạt động khác.Cách cảm biến nắm bắt chuyển động của trục cam phụ thuộc vào loại công nghệ cụ thể mà nó sử dụng.Các loại phổ biến nhất bao gồm từ tính, cảm ứng, hiệu ứng hội trường và cảm biến quang học.
Một cảm biến từ tính hoạt động dựa trên những thay đổi trong từ trường.Khi trục cam quay, nó gây ra sự dao động trong từ trường, mà cảm biến phát hiện.Những thay đổi này sau đó được chuyển đổi thành tín hiệu điện được gửi đến ECM.Tương tự, một cảm biến cảm ứng hoạt động bằng cách sử dụng cuộn dây và nam châm.Khi trục cam quay, răng kim loại trên một bánh răng đi qua cảm biến, thay đổi từ trường và tạo ra tín hiệu điện áp.
Cảm biến hiệu ứng Hall hoạt động khác nhau bằng cách sử dụng chip bán dẫn để phát hiện từ trường.Thay vì dựa vào việc thay đổi mức điện áp, nó tạo ra tín hiệu kỹ thuật số bật và tắt khi trục cam quay.Điều này cho phép ECM nhận được tín hiệu sạch và chính xác.Mặt khác, một cảm biến quang học sử dụng chùm ánh sáng và đĩa xoay với các khe hoặc lỗ.Khi đĩa quay với trục cam, nó làm gián đoạn chùm sáng đều đặn.Cảm biến phát hiện các gián đoạn này và chuyển đổi chúng thành các tín hiệu chỉ ra vị trí trục cam.
Mỗi loại cảm biến vị trí trục cam đều có lợi ích riêng, nhưng tất cả chúng đều phục vụ cùng một mục đích, cung cấp cho ECM chính xác và dữ liệu.Điều này đảm bảo hiệu suất động cơ thích hợp, đốt nhiên liệu hiệu quả và vận hành xe trơn tru.
Các loại và đặc điểm của cảm biến vị trí trục cam
Có nhiều loại cảm biến vị trí trục cam khác nhau và chúng được phân loại dựa trên cách chúng hoạt động.Ba loại chính là cảm biến loại từ tính, cảm biến đầu ra AC và cảm biến hiệu ứng Hall.Mỗi cảm biến này hoạt động theo một cách hơi khác nhau và được thiết kế để đáp ứng nhu cầu của các hệ thống động cơ cụ thể.Hiểu các loại này và đặc điểm của chúng giúp lựa chọn cảm biến phù hợp với xe và chẩn đoán bất kỳ vấn đề nào có thể phát sinh.
Cảm biến loại từ tính
Cảm biến vị trí trục cam từ tính hoạt động bằng cách sử dụng nguyên tắc cảm ứng điện từ.Nó chứa một nam châm vĩnh cửu và một cuộn dây.Khi trục cam quay, một bánh xe có răng hoặc người miễn cưỡng đi gần với cảm biến, gây ra những thay đổi trong từ trường.Những thay đổi này tạo ra một tín hiệu điện khác nhau về cường độ và tần số, tùy thuộc vào tốc độ quay trục cam.Loại cảm biến này thường được đặt bên trong nhà phân phối hoặc gần trục cam.

Hình 4. Cảm biến vị trí trục cam loại từ
Nó tạo ra một tín hiệu điện áp tương tự, có nghĩa là tín hiệu liên tục thay đổi khi trục cam di chuyển.Một trong những lợi thế lớn nhất của cảm biến từ tính là tính đơn giản và độ bền của nó.Nó không cần một nguồn năng lượng bên ngoài, làm cho nó đáng tin cậy trong nhiều điều kiện động cơ.Tuy nhiên, nó có một số nhược điểm.Sức mạnh của tín hiệu có thể bị ảnh hưởng bởi sự thay đổi nhiệt độ và vị trí chính xác của cảm biến.Nếu cảm biến không được đặt chính xác, hoặc nếu nó quá nóng, hiệu suất của nó có thể giảm.
Cảm biến đầu ra AC
Cảm biến vị trí trục cam đầu ra AC tạo ra tín hiệu dòng điện xen kẽ (AC) khi trục cam quay.Cảm biến này hoạt động với một bánh xe miễn cưỡng, có răng cách cẩn thận.Khi các răng này đi qua cảm biến, chúng tạo ra một điện áp AC mà ECM sử dụng để xác định vị trí trục cam và thời gian của các xi lanh động cơ.Cảm biến này thường nằm gần trục cam và thường được tích hợp với các thành phần thời gian động cơ khác.
Hình 5. Cảm biến loại cảm biến đầu ra AC
Ưu điểm chính của nó là nó tạo ra tín hiệu mạnh, ngay cả khi động cơ đang chạy ở tốc độ thấp.Điều này làm cho nó trở thành một lựa chọn tốt để đảm bảo ECM nhận được dữ liệu chính xác trong mọi điều kiện lái xe.Tuy nhiên, tín hiệu từ cảm biến đầu ra AC cần được xử lý trước khi ECM có thể sử dụng chính xác.Điều này có nghĩa là ECM phải có công nghệ phù hợp để giải thích dữ liệu đúng cách.
Cảm biến hiệu ứng hội trường
Cảm biến vị trí trục cam hiệu ứng Hall tiến bộ hơn các loại khác.Nó hoạt động bằng cách sử dụng chip bán dẫn phát hiện các thay đổi trong từ trường.Cảm biến này có ba dây: một cho nguồn, một cho mặt đất và một để gửi tín hiệu.Khi một vật thể kim loại, chẳng hạn như một bánh xe miễn cưỡng hoặc thời gian, di chuyển qua cảm biến, nó thay đổi từ trường.Điều này kích hoạt hiệu ứng Hall, tạo ra tín hiệu kỹ thuật số dưới dạng các xung bật/tắt.

Hình 6. Cảm biến trục cam hiệu ứng Hall
Loại cảm biến này được đặt gần bánh răng trục cam hoặc bánh răng thời gian.Không giống như các cảm biến từ tính, tạo ra tín hiệu tương tự, cảm biến hiệu ứng Hall tạo ra tín hiệu số.Điều này làm cho nó chính xác và đáng tin cậy hơn.Nó cũng ít bị ảnh hưởng bởi thay đổi nhiệt độ hoặc nhiễu điện, có nghĩa là nó cung cấp dữ liệu chính xác trong các điều kiện khác nhau.Tuy nhiên, loại cảm biến này yêu cầu một nguồn năng lượng để vận hành.Nếu nó thất bại, việc chẩn đoán và sửa chữa có thể khó khăn hơn so với các cảm biến đơn giản hơn.
Hệ thống dây điện và truyền tín hiệu của cảm biến vị trí trục cam
Cảm biến vị trí trục cam (CMP) là một thành phần quan trọng trong các động cơ đốt trong hiện đại, chịu trách nhiệm giám sát vị trí và tốc độ quay của trục cam.Dữ liệu này sau đó được gửi đến Đơn vị điều khiển điện tử (ECU), sử dụng nó để điều chỉnh các chức năng chính của động cơ như thời gian đánh lửa, phun nhiên liệu và thời gian van.Bằng cách đảm bảo rằng ECU nhận được chính xác và thông tin về vị trí trục cam, cảm biến giúp tối ưu hóa hiệu quả của động cơ, đầu ra điện và kiểm soát khí thải.Nếu không có cảm biến vị trí trục cam hoạt động đúng, ECU không thể phối hợp chính xác các hoạt động của động cơ, có thể dẫn đến hiệu suất kém, tăng mức tiêu thụ nhiên liệu và thậm chí lỗi động cơ trong các trường hợp nghiêm trọng.Cảm biến này rất quan trọng trong các động cơ hiện đại dựa vào việc phun nhiên liệu tuần tự và thời gian van biến đổi, vì bất kỳ sự không chính xác nào trong dữ liệu vị trí trục cam có thể phá vỡ toàn bộ quá trình đốt cháy.
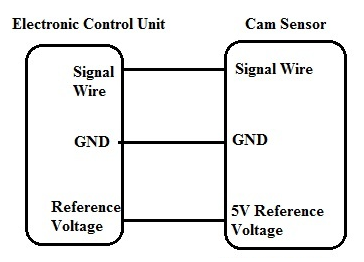
Hình 7. Hệ thống dây cảm biến vị trí trục cam
Trong thiết lập cảm biến vị trí trục cam ba dây, cảm biến được kết nối bằng điện với ECU thông qua ba dây riêng biệt: dây tín hiệu, dây mặt đất (GND) và dây điện áp tham chiếu.Mỗi dây này đóng một vai trò trong việc đảm bảo rằng cảm biến hoạt động chính xác.Dây tín hiệu chịu trách nhiệm truyền dữ liệu vị trí từ cảm biến sang ECU.Khi trục cam quay, cảm biến phát hiện chuyển động của nó và chuyển đổi nó thành tín hiệu điện, sau đó được gửi qua dây tín hiệu đến ECU.Điều này cho phép ECU xác định thời gian chính xác của việc phun nhiên liệu và đánh lửa tia lửa, đảm bảo hoạt động động cơ trơn tru.Dây mặt đất (GND) cung cấp mặt đất điện để hoàn thành mạch, ngăn chặn các dao động điện có thể cản trở hiệu suất của cảm biến.Dây điện áp tham chiếu, thường cung cấp 5V ổn định từ ECU, cung cấp năng lượng cho cảm biến, cho phép nó tạo ra tín hiệu chính xác và nhất quán.Nếu bất kỳ dây nào trong số các dây này bị hỏng hoặc bị ngắt kết nối, cảm biến có thể không truyền dữ liệu chính xác, dẫn đến các vấn đề về hiệu suất động cơ.
Khi trục cam quay trong quá trình vận hành động cơ, cảm biến vị trí trục cam liên tục theo dõi vị trí của nó và gửi các tín hiệu điện áp tương ứng đến ECU.ECU sau đó sử dụng thông tin này để điều chỉnh phân phối nhiên liệu, thời gian đánh lửa và thời gian van, đảm bảo hiệu quả đốt tối ưu.Trong các động cơ được trang bị các hệ thống thời gian van (VVT) thay đổi, cảm biến vị trí trục cam đóng vai trò thậm chí còn quan trọng hơn bằng cách cung cấp dữ liệu cho phép ECU điều chỉnh thời gian van động cho tiết kiệm nhiên liệu và hiệu suất tốt hơn.Một cảm biến trục trặc hoặc hệ thống dây bị lỗi có thể dẫn đến nhiều vấn đề động cơ, bao gồm không phù hợp, không hoạt động thô, do dự trong quá trình tăng tốc, tiết kiệm nhiên liệu kém và thậm chí là một động cơ không thể khởi động.Trong nhiều trường hợp, ECU sẽ phát hiện lỗi trong mạch cảm biến và kích hoạt đèn kiểm tra động cơ (CEL), lưu trữ mã sự cố chẩn đoán (DTC) có thể được lấy bằng máy quét OBD-II.
Kiểm tra và bảo trì thường xuyên cảm biến vị trí trục cam và hệ thống dây điện của nó cần phải đảm bảo hiệu suất động cơ đáng tin cậy.Nếu động cơ biểu hiện các triệu chứng của cảm biến không thành công, nên tiến hành một quá trình chẩn đoán kỹ lưỡng, bao gồm kiểm tra các kết nối dây cảm biến, kiểm tra việc cung cấp điện áp và kiểm tra chính cảm biến để làm hỏng hoặc ô nhiễm.Trong một số trường hợp, một cảm biến bẩn hoặc bị hư hỏng có thể gây mất tín hiệu không liên tục, dẫn đến các vấn đề về hiệu suất động cơ lẻ tẻ.Thay thế một cảm biến vị trí trục cam bị lỗi thường là một quá trình đơn giản, nhưng đảm bảo các kết nối nối dây thích hợp cũng quan trọng không kém.Một cảm biến vị trí trục cam hoạt động tốt cho phép ECU kiểm soát chính xác các hoạt động của động cơ, cải thiện hiệu quả, giảm khí thải và tăng cường hiệu suất lái xe tổng thể.
Làm thế nào để phát hiện các vấn đề cảm biến vị trí trục cam?
Một cảm biến vị trí trục cam bị lỗi có thể gây ra các vấn đề về hiệu suất động cơ nghiêm trọng.Dưới đây là các triệu chứng chính, nguyên nhân của chúng và cách chúng ảnh hưởng đến chiếc xe của bạn:
Động cơ sai
Khi các trục trặc cảm biến vị trí trục cam, ECM sẽ nhận được dữ liệu không chính xác về vị trí trục cam.Điều này phá vỡ sự phối hợp chính xác giữa kim phun nhiên liệu và hệ thống đánh lửa, dẫn đến thời gian phun nhiên liệu không phù hợp.Do đó, quá trình đốt cháy có thể không xảy ra chính xác trong một hoặc nhiều xi lanh, khiến động cơ bị mất điện.Bạn có thể nhận thấy các triệu chứng như do dự trong khi lái xe, trải nghiệm lái xe thô bạo hoặc run rẩy hoặc mất điện đột ngột khi tăng tốc.Các sai lệch thường xuyên có thể làm tăng lượng khí thải, giảm hiệu quả động cơ và thậm chí gây ra thiệt hại lâu dài cho các thành phần động cơ.Nếu không được giải quyết, các sai lệch lặp đi lặp lại có thể kích hoạt ánh sáng kiểm tra động cơ và dẫn đến các lỗi cơ học nghiêm trọng hơn.

Hình 8. Bugi bị lỗi và bị hư hỏng do sự sai lệch của động cơ
Tiết kiệm nhiên liệu kém
Cảm biến vị trí trục cam đóng một vai trò trong việc điều chỉnh phun nhiên liệu bằng cách giúp ECM xác định lượng nhiên liệu chính xác cần thiết để đốt tối ưu.Khi cảm biến thất bại, ECM có thể tiêm quá nhiều hoặc quá ít nhiên liệu, gây ra quá trình đốt cháy không hiệu quả và giảm tiết kiệm nhiên liệu tổng thể.Điều này có nghĩa là động cơ sẽ đốt cháy nhiều nhiên liệu hơn mức cần thiết, dẫn đến mức tiêu thụ nhiên liệu cao hơn và tăng chi phí tại máy bơm.Sự sụt giảm đáng chú ý về hiệu quả nhiên liệu cũng có thể chỉ ra rằng động cơ đang bù cho dữ liệu không chính xác bằng cách làm việc chăm chỉ hơn bình thường.Theo thời gian, biến dạng thêm này có thể tăng tốc độ hao mòn trên các thành phần động cơ khác nhau, có khả năng dẫn đến các vấn đề cơ học hơn nữa.Nếu bạn nhận thấy giảm số dặm, điều quan trọng là chẩn đoán và giải quyết vấn đề ngay lập tức.
Nhàn rỗi
Một cảm biến vị trí trục cam bị hỏng có thể khiến động cơ phải vật lộn để duy trì sự nhàn rỗi ổn định.Nếu không có dữ liệu chính xác từ cảm biến, ECM có thể tính toán sai hỗn hợp nhiên liệu không khí và thời gian đánh lửa, dẫn đến hành vi động cơ thất thường khi xe bị nghỉ ngơi.Bạn có thể trải qua những rung động quá mức, RPM dao động hoặc thậm chí nghe thấy những tiếng động khác thường phát ra từ động cơ.Trong một số trường hợp, động cơ có thể bị đình trệ khi dừng ở đèn đỏ hoặc trong khi không hoạt động trong giao thông.Vấn đề này có thể trở nên nghiêm trọng hơn theo thời gian, gây khó khăn cho việc giữ cho động cơ hoạt động trơn tru.Bỏ qua việc nhàn rỗi thô có thể dẫn đến thiệt hại hơn nữa đối với các thành phần hệ thống đánh lửa và nhiên liệu, làm cho việc sửa chữa tốn kém hơn trong thời gian dài.
Khó khăn bắt đầu động cơ
Cảm biến vị trí trục cam giúp ECM xác định vị trí chính xác của piston trước khi đánh lửa.Nếu cảm biến bắt đầu bị lỗi, nó có thể gửi tín hiệu yếu, bị trì hoãn hoặc không chính xác, khiến cho động cơ khó khởi động.Điều này có thể dẫn đến việc quay động cơ trong một thời gian dài trước khi cuối cùng lật lại hoặc, trong một số trường hợp, không bắt đầu hoàn toàn.Các vấn đề bắt đầu lặp đi lặp lại có thể gây căng thẳng cho pin và động cơ khởi động, làm tăng nguy cơ thất bại sớm của các thành phần này.Nếu xe của bạn thường xuyên đấu tranh để bắt đầu, điều quan trọng là chẩn đoán liệu cảm biến vị trí trục cam có phải là thủ phạm hay không.Thay thế cảm biến không thành công sớm có thể ngăn chặn sự hao mòn không cần thiết trên các phần khác của hệ thống bắt đầu.
Giật hoặc bị đình trệ khi lái xe
Tín hiệu không nhất quán từ cảm biến vị trí trục cam bị lỗi có thể dẫn đến mất điện đột ngột khi lái xe.Bạn có thể nhận thấy chiếc xe giật hoặc do dự, đặc biệt là trong quá trình tăng tốc, khi động cơ đấu tranh để duy trì thời gian thích hợp.Điều này có thể khiến việc lái xe không thể đoán trước và không an toàn trong giao thông hoặc ở tốc độ đường cao tốc.Trong trường hợp nghiêm trọng, động cơ có thể bị đình trệ hoàn toàn mà không có cảnh báo, gây nguy hiểm an toàn.Một động cơ bị đình trệ có thể nguy hiểm nếu nó xảy ra ở giữa giao lộ hoặc trong khi sáp nhập trên đường cao tốc.Nếu xe của bạn trải qua các quầy hàng thường xuyên hoặc chuyển động giật đột ngột, thì điều quan trọng là kiểm tra và thay thế cảm biến vị trí trục cam càng sớm càng tốt để khôi phục hiệu suất mượt mà và đáng tin cậy.
Nguyên nhân phổ biến của thất bại cảm biến vị trí trục cam
Cảm biến vị trí trục cam đóng vai trò trong thời gian và hiệu suất của động cơ, nhưng giống như bất kỳ thành phần nào, nó dễ bị hỏng theo thời gian.Một số yếu tố góp phần vào sự cố của nó, từ ảnh hưởng môi trường đến hao mòn cơ học và lắp đặt không phù hợp.Hiểu những nguyên nhân này có thể giúp chẩn đoán các vấn đề sớm và ngăn ngừa các vấn đề động cơ bất ngờ.
Điều kiện môi trường
Các điều kiện môi trường khắc nghiệt, chẳng hạn như nhiệt độ khắc nghiệt, độ ẩm cao và tiếp xúc với bụi bẩn hoặc mảnh vụn, có thể có tác động đến tuổi thọ của cảm biến vị trí trục cam.Vì cảm biến nằm trong khoang động cơ, nó liên tục chịu mức nhiệt cao, điều này có thể dẫn đến sự xuống cấp của mạch bên trong của nó.Theo thời gian, việc tiếp xúc kéo dài với nhiệt quá mức có thể khiến các thành phần điện tử của cảm biến mở rộng và co lại, dẫn đến các vicrocracks trong mạch và lỗi cuối cùng.Ở vùng khí hậu lạnh, biến động nhiệt độ nhanh cũng có thể góp phần tích tụ ngưng tụ, có khả năng gây ra các mạch ngắn bên trong làm gián đoạn truyền tín hiệu của cảm biến.
Sự xâm nhập của độ ẩm là một yếu tố môi trường khác có thể ảnh hưởng tiêu cực đến chức năng cảm biến.Nếu nước hoặc độ ẩm thấm vào vỏ của cảm biến, nó có thể dẫn đến sự ăn mòn của hệ thống dây điện và đầu nối bên trong, làm suy yếu độ dẫn điện.Muối và hóa chất đường được sử dụng để khử trùng trong điều kiện mùa đông có thể tăng tốc ăn mòn, tiếp tục ảnh hưởng đến hiệu quả của cảm biến.Ngoài ra, bụi bẩn, bụi bẩn và các mảnh vụn từ những con đường chưa trải nhựa hoặc lái xe ngoài đường có thể tích lũy xung quanh cảm biến, cản trở khả năng phát hiện chính xác vị trí trục cam.Nếu không che chắn và bảo trì thích hợp, việc tiếp xúc kéo dài với các yếu tố này có thể dần dần dẫn đến sự cố cảm biến.
Sự ô nhiễm
Rò rỉ dầu và ô nhiễm từ chất lỏng động cơ có thể ảnh hưởng lớn đến hiệu suất của cảm biến vị trí trục cam bằng cách can thiệp vào khả năng phát hiện chính xác vị trí quay của trục cam.Nếu động cơ phát triển rò rỉ dầu do miếng đệm nắp van bị mòn, rò rỉ trục cam hoặc hệ thống thông gió bị lỗi, dầu có thể thấm vào cảm biến, tạo ra một lớp bụi bẩn và cặn.Sự tích tụ này có thể cách điện cảm biến khỏi nhận tín hiệu từ tính thích hợp từ trục cam, dẫn đến số đọc không chính xác hoặc lỗi cảm biến hoàn chỉnh.Ô nhiễm dầu có thể thấm vào các đầu nối điện cảm biến, gây ra kết nối kém và mất tín hiệu không liên tục, có thể kích hoạt đèn kiểm tra động cơ và ảnh hưởng đến hiệu suất của động cơ.
Ngoài ô nhiễm dầu, vỏ kim loại từ hao mòn động cơ bên trong cũng có thể làm tổn hại độ chính xác của cảm biến.Vì nhiều cảm biến vị trí trục cam dựa trên từ trường để phát hiện chuyển động trục cam, sự hiện diện của các hạt kim loại nhỏ có thể phá vỡ trường này, dẫn đến các bài đọc cảm biến thất thường.Những vỏ kim loại này có thể bắt nguồn từ các thành phần thời gian bị mòn, bôi trơn không đúng cách hoặc hao mòn động cơ quá mức theo thời gian.Thay đổi và kiểm tra dầu thường xuyên có thể giúp giảm nguy cơ ô nhiễm và đảm bảo rằng cảm biến vẫn không có vật cản có thể làm giảm chức năng của nó.
Mặc cơ khí và lão hóa
Giống như bất kỳ thành phần động cơ nào khác, cảm biến vị trí trục cam trải qua hao mòn tự nhiên theo thời gian do tiếp xúc kéo dài với các rung động động cơ, chu kỳ nhiệt và hoạt động liên tục.Khi cảm biến già đi, các thành phần điện tử bên trong của nó có thể xuống cấp, dẫn đến giảm độ chính xác trong việc phát hiện vị trí trục cam.Vỏ nhựa của cảm biến cũng có thể trở nên giòn từ việc tiếp xúc nhiều lần với nhiệt và căng thẳng động cơ, làm tăng khả năng các vết nứt và thất bại.Hơn nữa, bánh xe miễn cưỡng hoặc các thành phần thời gian mà cảm biến tương tác có thể bị hao mòn theo thời gian, khiến cảm biến phải vật lộn với việc đọc chính xác vị trí trục cam.
Hệ thống dây điện và đầu nối liên quan đến cảm biến cũng có thể xấu đi theo tuổi, dẫn đến các vấn đề kết nối không liên tục.Dây bị sờn hoặc giòn có thể gây ra các tín hiệu điện không nhất quán, dẫn đến các misfires động cơ, đình trệ hoặc do dự trong quá trình tăng tốc.Trong một số trường hợp, các đầu nối điện lỏng lẻo hoặc bị ăn mòn có thể tạo ra tiếp xúc kém, dẫn đến hành vi động cơ thất thường và mã sự cố chẩn đoán.Kiểm tra thường xuyên hệ thống dây điện cảm biến và các thành phần xung quanh có thể giúp phát hiện các dấu hiệu lão hóa trước khi chúng leo thang vào các vấn đề hiệu suất nghiêm trọng.
Cài đặt hoặc xử lý không đúng
Việc cài đặt không chính xác cảm biến vị trí trục cam có thể dẫn đến lỗi sớm bằng cách đặt ứng suất không cần thiết lên thành phần hoặc gây ra sự liên kết không phù hợp với trục cam.Nếu cảm biến bị quá tải trong quá trình cài đặt, nó có thể bẻ khóa hoặc bóp méo vỏ, ảnh hưởng đến khả năng hoạt động chính xác của nó.Mặt khác, nếu nó được cài đặt một cách lỏng lẻo, nó có thể rung quá mức, dẫn đến các bài đọc không chính xác hoặc tách rời hoàn toàn khỏi vị trí gắn của nó.Theo các thông số kỹ thuật mô-men xoắn được đề xuất của nhà sản xuất là rất quan trọng để đảm bảo cài đặt an toàn nhưng không gây tổn hại.
Sử dụng các cảm biến hậu mãi chất lượng thấp có thể làm tăng khả năng thất bại sớm.Các cảm biến giá rẻ hoặc được sản xuất kém có thể không đáp ứng các tiêu chuẩn độ bền và hiệu suất giống như các thành phần OEM (nhà sản xuất thiết bị gốc), dẫn đến tuổi thọ ngắn hơn và thay thế thường xuyên.Xử lý thô trong quá trình bảo trì, chẳng hạn như thả cảm biến hoặc kéo vào dây nối quá mạnh, cũng có thể làm hỏng các mạch bên trong tinh tế.Cơ học và chủ sở hữu phương tiện nên cẩn thận khi thay thế cảm biến để tránh đưa ra căng thẳng không mong muốn có thể rút ngắn tuổi thọ hoạt động của nó.
Kiểm tra và duy trì cảm biến vị trí trục cam
Đảm bảo chức năng thích hợp của cảm biến vị trí trục cam rất quan trọng để duy trì hiệu quả và hiệu suất của động cơ.Một cảm biến bị lỗi có thể dẫn đến các vấn đề như nhàn rỗi thô, tăng tốc kém, sai lầm hoặc thậm chí là một điều kiện không bắt đầu.Để ngăn chặn những vấn đề này, cần kiểm tra và bảo trì thường xuyên.
Kiểm tra cảm biến vị trí trục cam
Một trong những cách hiệu quả nhất để kiểm tra cảm biến vị trí trục cam là bằng cách sử dụng đồng hồ vạn năng kỹ thuật số để đo điện áp, điện trở và đầu ra tín hiệu.Quá trình kiểm tra thường liên quan đến các bước sau:
1. Kiểm tra trực quan
Trước khi sử dụng bất kỳ công cụ thử nghiệm nào, hãy bắt đầu với việc kiểm tra trực quan kỹ lưỡng cảm biến vị trí trục cam và các thành phần xung quanh của nó.Tìm kiếm bất kỳ dấu hiệu thiệt hại vật lý, chẳng hạn như vết nứt, ăn mòn, ô nhiễm dầu hoặc đầu nối lỏng lẻo.Vì cảm biến thường được tiếp xúc với nhiệt, rung và chất lỏng động cơ, các đầu nối điện và dây nối của nó có thể xấu đi theo thời gian.Nếu có bất kỳ dây bị sờn hoặc kết nối lỏng lẻo, chúng nên được sửa chữa hoặc thay thế trước khi tiến hành thử nghiệm thêm.Đôi khi, một cảm biến bị lỗi có thể không phải là nguyên nhân gốc rễ của vấn đề.Hệ thống dây điện bị hỏng, nối đất kém hoặc pin yếu cũng có thể dẫn đến các bài đọc không chính xác.Đảm bảo rằng hệ thống dây điện còn nguyên vẹn và cảm biến được gắn an toàn có thể giúp loại bỏ các chẩn đoán và thay thế sai.Nếu mọi thứ có vẻ nguyên vẹn trong quá trình kiểm tra, hãy tiến hành thử nghiệm điện để xác nhận xem cảm biến có hoạt động chính xác hay không.
2. Kiểm tra nguồn cung cấp điện
Sau khi kiểm tra trực quan hoàn tất, bước tiếp theo là xác minh rằng cảm biến đang nhận được điện áp nguồn chính xác.Hầu hết các cảm biến vị trí trục cam hoạt động trên 5V hoặc 12V, được cung cấp bởi bộ điều khiển động cơ (ECU).Để kiểm tra điều này, hãy đặt đồng hồ vạn năng kỹ thuật số của bạn thành chế độ điện áp DC và kết nối đầu dò dương với dây nguồn cảm biến trong khi nối tiếp đầu dò âm.Khi đánh lửa chuyển sang vị trí BẬT (không khởi động động cơ), đồng hồ vạn năng sẽ hiển thị phạm vi điện áp dự kiến.Nếu cảm biến không nhận được năng lượng, vấn đề có thể nằm ở dây nịt, cầu chì hoặc ECU hơn là chính cảm biến.Một cầu chì bị thổi hoặc dây bị hỏng có thể làm gián đoạn nguồn điện, khiến cảm biến bị trục trặc.Nếu điện áp có mặt nhưng vẫn gặp sự cố, việc kiểm tra thêm đầu ra tín hiệu của cảm biến là cần thiết để xác định xem chính cảm biến có bị lỗi hay không.
3. Đo đầu ra tín hiệu
Sau khi xác nhận nguồn điện, bước tiếp theo là kiểm tra đầu ra tín hiệu cảm biến để đảm bảo nó truyền dữ liệu chính xác đến ECU.Trong khi động cơ đang chạy hoặc quay, hãy kết nối các đầu dò vạn năng với dây tín hiệu cảm biến và mặt đất.Điện áp sẽ dao động khi trục cam quay, từ 0,5V đến 5V trong cảm biến hiệu ứng Hall hoặc tạo ra tín hiệu dòng điện xen kẽ (AC) trong cảm biến miễn cưỡng từ tính.Nếu điện áp không đổi hoặc nằm ngoài phạm vi dự kiến, cảm biến có thể không phát hiện chính xác vị trí của trục cam.Một tín hiệu bị lỗi có thể gây ra các vấn đề về thời gian, dẫn đến sai lệch, nhàn rỗi thô hoặc hiệu quả nhiên liệu kém.Nếu phát hiện tín hiệu bất thường, nên kiểm tra bánh xe miễn cưỡng (cho cảm biến từ tính) hoặc thay thế cảm biến nếu cần thiết.
4. Kiểm tra điện trở (đối với một số cảm biến)
Một số loại cảm biến vị trí trục cam, cảm biến miễn cưỡng từ tính, có thể được kiểm tra bằng cách đo điện trở của chúng.Để thực hiện thử nghiệm này, hãy đặt Multimeter thành cài đặt OHMS (ω) và kết nối các đầu dò với các đầu cuối cảm biến.So sánh việc đọc điện trở với các thông số kỹ thuật được cung cấp bởi nhà sản xuất xe.Một cách đọc quá cao hoặc quá thấp có thể chỉ ra một lỗi bên trong trong cảm biến.Tuy nhiên, không phải tất cả các cảm biến vị trí trục cam đều có thể được kiểm tra theo cách này.Các cảm biến hiệu ứng Hall, tạo ra tín hiệu sóng vuông kỹ thuật số, không có điện trở có thể đo được.Thay vào đó, các cảm biến này dựa vào kiểm tra điện áp và tín hiệu.Nếu loại cảm biến của bạn không hỗ trợ kiểm tra điện trở, việc kiểm tra độ lệch so với phạm vi tiêu chuẩn có thể giúp xác định xem nó có cần được thay thế hay không.
5. Kiểm tra máy hiện sóng (phương pháp nâng cao)
Để phân tích chuyên sâu hơn về hiệu suất cảm biến vị trí trục cam, có thể sử dụng một dao động để quan sát dạng sóng tín hiệu của nó.Không giống như một đồng hồ vạn năng, chỉ cung cấp các bài đọc điện áp số, máy hiện sóng hiển thị một biểu đồ của đầu ra cảm biến, cho phép chẩn đoán chính xác hơn.Một cảm biến hoạt động đúng sẽ tạo ra một dạng sóng định kỳ ổn định tương ứng với vị trí quay trục trục cam.Nếu dạng sóng không đều, yếu hoặc thiếu các phần, điều này có thể chỉ ra sự suy giảm cảm biến, các vấn đề về hệ thống dây điện hoặc các vấn đề với chính trục cam.Kiểm tra dao động là hữu ích khi chẩn đoán các lỗi cảm biến không liên tục có thể không được phát hiện với một đồng hồ vạn năng tiêu chuẩn.Mặc dù phương pháp này đòi hỏi các công cụ và kiến thức nâng cao hơn, nhưng nó cung cấp đánh giá chính xác nhất về sức khỏe của cảm biến.
Duy trì cảm biến vị trí trục cam
Bảo trì thường xuyên giúp ngăn ngừa lỗi cảm biến sớm và đảm bảo hiệu suất động cơ tối ưu.Thực tiễn tốt nhất bao gồm:
1. Giữ cho cảm biến sạch sẽ
Bụi bẩn, dầu và các mảnh vụn có thể tích lũy trên cảm biến vị trí trục cam, có khả năng ảnh hưởng đến khả năng phát hiện chính xác vị trí trục cam.Do cảm biến hoạt động trong môi trường có độ rung cao, cao, các chất gây ô nhiễm có thể can thiệp vào việc truyền tín hiệu của nó, dẫn đến đọc thất thường hoặc thất bại hoàn toàn.Làm sạch thường xuyên là rất quan trọng để duy trì chức năng cảm biến thích hợp và ngăn chặn các tín hiệu sai có thể kích hoạt đèn kiểm tra đèn động cơ hoặc sự cố hiệu suất.Để làm sạch cảm biến một cách hiệu quả, sử dụng chất tẩy rửa tiếp xúc điện thích hợp hoặc bình xịt không cư trú được thiết kế cho các thành phần nhạy cảm.Tránh sử dụng dung môi khắc nghiệt hoặc khí nén, vì chúng có thể làm hỏng các thành phần cảm biến tinh tế.Khi làm sạch, nhẹ nhàng loại bỏ bất kỳ sự tích tụ bụi bẩn hoặc dầu, đảm bảo rằng bề mặt của cảm biến vẫn không có vật cản.Đảm bảo kiểm tra khu vực xung quanh để có rò rỉ hoặc bụi bẩn quá mức, vì những điều này có thể chỉ ra các vấn đề động cơ lớn hơn góp phần gây ô nhiễm cảm biến.
2. Kiểm tra hệ thống dây điện và đầu nối
Cảm biến vị trí trục cam dựa vào kết nối điện ổn định để chức năng chính xác.Theo thời gian, việc tiếp xúc với nhiệt, độ ẩm và các rung động của động cơ có thể dẫn đến ăn mòn, dây bị sờn hoặc đầu nối lỏng lẻo, tất cả đều có thể gây ra sự cố cảm biến không liên tục hoặc đọc thất thường.Nếu dây nối bị hỏng, cảm biến có thể không nhận được điện áp, dẫn đến tín hiệu thời gian không chính xác và hiệu suất động cơ kém.Để ngăn chặn những vấn đề này, thường xuyên kiểm tra dây nịt và đầu nối cảm biến để biết các dấu hiệu hao mòn hoặc hư hỏng.Tìm kiếm cách nhiệt bị nứt, ghim uốn hoặc ăn mòn tại các thiết bị đầu cuối.Nếu có bất kỳ vấn đề nào được tìm thấy, sửa chữa hoặc thay thế hệ thống dây điện bị ảnh hưởng ngay lập tức.Áp dụng mỡ điện môi cho đầu nối cảm biến có thể giúp ngăn ngừa sự tích tụ và ăn mòn độ ẩm, đảm bảo kết nối nhất quán và đáng tin cậy.
3. Giám sát hiệu suất của động cơ
Những thay đổi trong hiệu suất động cơ thường có thể đóng vai trò là dấu hiệu cảnh báo sớm của cảm biến vị trí trục cam bị hỏng.Nếu cảm biến bắt đầu trục trặc, bộ điều khiển động cơ (ECU) có thể nhận được dữ liệu không chính xác, dẫn đến các triệu chứng như không hoạt động thô, do dự trong quá trình tăng tốc hoặc mất điện đột ngột.Trong các trường hợp nghiêm trọng hơn, một cảm biến bị lỗi có thể khiến động cơ bị đình trệ hoặc không khởi động hoàn toàn.Bỏ qua các dấu hiệu cảnh báo này có thể dẫn đến thiệt hại lớn hơn cho các thành phần động cơ và tăng chi phí sửa chữa.Để đi trước các vấn đề tiềm năng, bạn nên chú ý đến bất kỳ hành vi động cơ bất thường nào và sử dụng máy quét OBD-II để kiểm tra các mã sự cố liên quan đến cảm biến vị trí trục cam.Nếu các mã chẩn đoán như P0340 (trục trặc mạch cảm biến vị trí trục cam) hoặc P0341 (vấn đề hiệu suất cảm biến vị trí trục cam) sẽ xuất hiện, nên kiểm tra và kiểm tra thêm ngay lập tức.Giải quyết các vấn đề liên quan đến cảm biến sớm có thể ngăn ngừa các biến chứng hơn nữa và giữ cho động cơ hoạt động trơn tru.
4. Thay thế cảm biến khi cần thiết
Ngay cả khi bảo trì thích hợp, các cảm biến vị trí trục cam có thể bị hao mòn theo thời gian do tiếp xúc với nhiệt, suy thoái điện hoặc lỗi thành phần bên trong.Nếu cảm biến liên tục tạo ra các tín hiệu thất thường, không sử dụng các xét nghiệm chẩn đoán hoặc kích hoạt mã sự cố liên tục, việc thay thế thường là giải pháp tốt nhất.Tiếp tục sử dụng một cảm biến thất bại có thể dẫn đến các vấn đề hiệu suất tồi tệ hơn, giảm hiệu quả nhiên liệu và thiệt hại tiềm tàng cho các thành phần động cơ khác.
Đặt lại cảm biến vị trí trục cam
Sau khi bảo dưỡng hoặc thay thế cảm biến vị trí trục cam, đặt lại mô -đun điều khiển động cơ (ECM) là một bước quan trọng để đảm bảo xe hoạt động hiệu quả.ECM dựa vào dữ liệu cảm biến để quản lý phun nhiên liệu, thời gian đánh lửa và hiệu suất của động cơ tổng thể.Nếu ECM không được đặt lại sau khi cài đặt cảm biến mới, nó có thể tiếp tục sử dụng dữ liệu lỗi thời, dẫn đến các vấn đề về hiệu suất như không hoạt động thô, tăng tốc kém hoặc thậm chí kiểm tra cảnh báo động cơ.Có một số cách để đặt lại ECM sau khi thay thế cảm biến vị trí trục cam, từ đặt lại thủ công đơn giản đến các phương pháp công cụ chẩn đoán nâng cao hơn.
Phương pháp ngắt kết nối pin (Đặt lại thủ công cơ bản)
Đây là cách đơn giản nhất để thiết lập lại ECM và có hiệu quả đối với hầu hết các phương tiện.Ngắt kết nối pin tạm thời cắt nguồn điện cho ECM, buộc nó phải đặt lại và xóa bất kỳ dữ liệu cảm biến được lưu trữ nào.
Các bước:
• Đảm bảo xe ở một vị trí an toàn, tắt và trong công viên (hoặc trung tính để truyền tay)
Trước khi bắt đầu, hãy chắc chắn rằng chiếc xe được đỗ trên bề mặt cấp độ ở một vị trí an toàn và ổn định.Tắt hoàn toàn đánh lửa, đảm bảo rằng tất cả các thành phần điện như đèn, đài phát thanh và điều khiển khí hậu được tắt.Để truyền tự động, hãy chuyển thiết bị vào công viên, trong khi các phương tiện truyền dẫn thủ công nên được đặt thành trung tính với phanh đỗ xe tham gia để ngăn chặn bất kỳ chuyển động nào.
• Mở mui xe và xác định vị trí pin của xe
Bật mui xe bằng cách sử dụng cần thả mui xe bên trong xe, thường nằm gần ghế lái hoặc dưới bảng điều khiển.Khi mui xe mở, sử dụng thanh mui xe (nếu cần) để bảo vệ nó.Xác định vị trí pin, được tìm thấy trong khoang động cơ nhưng đôi khi có thể được đặt trong thân cây hoặc dưới ghế sau trong một số xe nhất định.Pin sẽ có hai thiết bị đầu cuối: một lần dương (+) và một âm (-), thường được đánh dấu bằng vỏ màu đỏ và đen, tương ứng.
• Sử dụng cờ lê để ngắt kết nối thiết bị đầu cuối âm (-) của pin
Với một chiếc cờ lê hoặc bộ ổ cắm, hãy cẩn thận nới lỏng đai ốc đảm bảo cáp thiết bị đầu cuối pin âm (-).Luôn ngắt kết nối thiết bị đầu cuối âm trước để giảm nguy cơ mạch điện ngắn.Khi đai ốc được nới lỏng, nhẹ nhàng tháo cáp ra khỏi thiết bị đầu cuối và đặt nó sang một bên, đảm bảo nó không tiếp xúc với bất kỳ bề mặt kim loại hoặc thiết bị đầu cuối dương.Một số phương tiện có thể có vỏ nhựa trên các thiết bị đầu cuối cần phải được gỡ bỏ trước khi có thể truy cập.
• Đợi ít nhất 15 đến 30 phút để cho phép nguồn điện còn lại thoát khỏi hệ thống
Sau khi ngắt kết nối pin, hãy đợi ít nhất 15 đến 30 phút để đảm bảo rằng mọi điện tích còn lại sẽ tiêu tan khỏi các hệ thống điện tử của xe.Điều này cho phép ECM thiết lập lại hoàn toàn.Trong một số trường hợp, đặc biệt là với các phương tiện mới hơn hoặc những chiếc có máy tính trên tàu phức tạp, phải chờ đến một giờ có thể cần thiết lập lại hoàn toàn.Trong thời gian này, nhấn bàn đạp phanh hoặc bật đèn pha trong vài giây có thể giúp thoát bất kỳ sức mạnh kéo dài nào từ hệ thống nhanh hơn.
• Kết nối lại thiết bị đầu cuối âm và thắt chặt nó một cách an toàn
Khi thời gian chờ đợi đã trôi qua, hãy gắn lại cáp pin âm (-) đến đầu cuối.Bảo vệ nó bằng cách siết chặt đai ốc bằng cờ lê, đảm bảo kết nối chắc chắn và ổn định.Một kết nối lỏng lẻo có thể gây ra các vấn đề về điện hoặc ngăn ECM hoạt động chính xác.Nếu xe có hệ thống quản lý pin (BMS), nó có thể cần được đặt lại bằng công cụ quét hoặc theo các quy trình dành riêng cho nhà sản xuất.
• Khởi động xe và cho phép nó nhàn rỗi trong vài phút trong khi ECM học lại dữ liệu cảm biến mới
Sau khi kết nối lại pin, hãy khởi động động cơ và để nó nhàn rỗi trong vài phút.Điều này cho phép ECM học lại các tham số, chẳng hạn như hỗn hợp nhiên liệu và tốc độ không tải, dựa trên dữ liệu cảm biến.Trong giai đoạn này, tránh quay vòng động cơ hoặc lái xe ngay lập tức, vì hệ thống cần thời gian để hiệu chỉnh lại.Một số phương tiện có thể yêu cầu lái xe trong các điều kiện cụ thể, chẳng hạn như duy trì tốc độ ổn định trong một vài dặm, để hoàn thành quá trình học lại.
Phương pháp đặt lại máy quét OBD-II (được khuyến nghị cho độ chính xác)
Sử dụng máy quét OBD-II (Máy quét chẩn đoán trên bo mạch) cung cấp một cách chính xác hơn để đặt lại ECM và đảm bảo tất cả các mã lỗi cảm biến trước đó được xóa.
Các bước:
• Xác định vị trí cổng OBD-II
Bước đầu tiên là tìm cổng OBD-II, được đặt bên dưới bảng điều khiển ở phía người lái.Trong hầu hết các phương tiện, nó nằm gần cột lái, gần nơi người lái xe đầu gối sẽ ngồi khi ngồi.Nếu bạn không chắc chắn về vị trí chính xác, hãy tham khảo hướng dẫn sử dụng của chủ sở hữu xe của bạn hoặc tìm kiếm một đầu nối nhỏ, hình chữ nhật, 16 chân.
• cắm vào máy quét OBD-II và bật đánh lửa
Khi cổng OBD-II được xác định, hãy chèn đầu nối máy quét OBD-II vào cổng.Sau khi cắm nó vào, chuyển phím đánh lửa sang vị trí BẬT mà không cần khởi động động cơ.Điều này sẽ tăng sức mạnh cho hệ thống điện của xe và cho phép máy quét thiết lập kết nối với ECM.Một số phương tiện có thể yêu cầu nhấn nút nguồn trên chính máy quét để kích hoạt nó.
• Kiểm tra mã sự cố được lưu trữ
Sử dụng menu máy quét, điều hướng đến chức năng mã đọc.Tính năng này cho phép bạn truy xuất bất kỳ mã sự cố hoạt động hoặc được lưu trữ nào liên quan đến cảm biến vị trí trục cam hoặc các thành phần động cơ khác.Xem xét các mã này có thể giúp xác nhận liệu vấn đề đã được giải quyết hoặc nếu cần sửa chữa bổ sung trước khi tiến hành thiết lập lại.
• Xóa mã lỗi
Sau khi xem xét mã sự cố, chọn tùy chọn Clear Code hoặc đặt lại ECM trên máy quét.Lệnh này sẽ hướng dẫn ECM xóa bất kỳ thông báo lỗi được lưu trữ nào, đặt lại hệ thống.Quá trình này có thể mất một vài khoảnh khắc và trong một số trường hợp, máy quét có thể nhắc bạn xác nhận thiết lập lại trước khi tiến hành.
• Tắt đánh lửa và rút phích cắm máy quét
Khi các mã đã được xóa thành công, hãy tắt hoàn toàn sự đánh lửa của xe.Cẩn thận rút phích cắm máy quét OBD-II khỏi cổng, đảm bảo rằng không có thiệt hại nào xảy ra với các chân kết nối.Tại thời điểm này, ECM đã được thiết lập lại và bất kỳ mã lỗi nào trước đây liên quan đến cảm biến vị trí trục cam sẽ không còn nữa.
• Khởi động động cơ và để xe không hoạt động
Với máy quét bị ngắt kết nối, hãy khởi động động cơ và để nó nhàn rỗi trong vài phút.Điều này cho phép ECM tái tạo và nhận biết cảm biến vị trí trục cam mới được cài đặt.Trong thời gian này, quan sát bảng điều khiển cho bất kỳ đèn cảnh báo mới.Nếu đèn kiểm tra động cơ vẫn tắt và động cơ chạy trơn tru, thiết lập lại đã thành công.Tuy nhiên, nếu đèn cảnh báo xuất hiện trở lại, có thể cần phải chẩn đoán thêm để giải quyết mọi vấn đề tiềm ẩn.
Drive Chu kỳ hiệu chỉnh lại (Đặt lại ECM tự động)
Trong một số phương tiện, ECM có thể không yêu cầu thiết lập lại thủ công, vì nó có thể tự động học lại dữ liệu của cảm biến mới trong một khoảng thời gian chu kỳ lái xe.Tuy nhiên, quá trình này có thể mất thời gian và có thể dẫn đến các vấn đề hiệu suất tạm thời nếu ECM vẫn đang điều chỉnh.
Các bước:
• Bắt đầu xe và để nó nhàn rỗi
Bắt đầu bằng cách khởi động động cơ và cho phép nó nhàn rỗi trong khoảng 5-10 phút.Điều này giúp ECM thu thập dữ liệu cơ sở từ cảm biến mới và ổn định các tham số động cơ.Tránh nhấn máy gia tốc hoặc quay động cơ trong giai đoạn này, vì mục tiêu là để chiếc xe ổn định trạng thái nhàn rỗi bình thường.
• Lái xe trong các điều kiện khác nhau
Sau khoảng thời gian nhàn rỗi ban đầu, hãy lái xe cho một ổ đĩa bao gồm hỗn hợp các điều kiện lái xe.Lý tưởng nhất là lái xe từ 20-50 dặm, kết hợp cả tốc độ đường cao tốc ổn định (55-65 dặm / giờ) và giao thông thành phố dừng và đi.Các điều kiện khác nhau này cho phép ECM phân tích các bài đọc cảm biến dưới các tải động cơ khác nhau, đảm bảo nó thích nghi đúng với các thay đổi.Nếu có thể, tránh tăng tốc đột ngột hoặc phanh mạnh, vì lái xe trơn tru giúp hệ thống hiệu chỉnh lại hiệu quả hơn.
• Tắt động cơ và khởi động lại
Khi chu kỳ ổ đĩa hoàn tất, đỗ xe và tắt động cơ.Đợi một vài khoảnh khắc trước khi khởi động lại để cho phép ECM xử lý dữ liệu mới.Sau khi khởi động lại, hãy kiểm tra xem các cảnh báo hoặc vấn đề về hiệu suất của Đèn kiểm tra Động cơ (CEL) còn lại.Nếu ánh sáng vẫn tắt và chiếc xe chạy trơn tru, ECM có thể đã hoàn thành quá trình thích ứng.Tuy nhiên, nếu CEL vẫn tồn tại hoặc phương tiện thể hiện các vấn đề về hiệu suất liên tục, có thể cần khắc phục sự cố hơn nữa.
Giao thoa một cảm biến vị trí trục cam với bộ vi điều khiển
Việc tích hợp cảm biến vị trí trục cam với bộ vi điều khiển, chẳng hạn như Arduino hoặc PIC, đòi hỏi phải hiểu loại tín hiệu của cảm biến và đảm bảo các kết nối thích hợp.Cảm biến vị trí trục cam đầu ra Các loại tín hiệu khác nhau, bao gồm kỹ thuật số (BẬT/TẮT), điện áp tương tự hoặc điều chế độ rộng xung (PWM).Các cảm biến hiệu ứng Hall tạo ra tín hiệu cao/thấp kỹ thuật số để đáp ứng với những thay đổi trong từ trường khi trục cam quay.Các cảm biến quang học, sử dụng ánh sáng để phát hiện chuyển động trục cam, cũng tạo ra các tín hiệu xung kỹ thuật số tương ứng với các vị trí khác nhau.Mặt khác, các cảm biến từ tính (độ miễn cưỡng thay đổi) tạo ra tín hiệu điện áp thay đổi trong đó biên độ thay đổi khi xoay, cung cấp dữ liệu vị trí.
Để giao diện các cảm biến này bằng vi điều khiển, cần phải chọn các chân đầu vào phù hợp dựa trên loại tín hiệu, các cảm biến kỹ thuật số kết nối với các chân đầu vào kỹ thuật số, trong khi các cảm biến tương tự yêu cầu đầu vào tương tự.Phạm vi điện áp đầu vào vi điều khiển cũng phải phù hợp với đầu ra cảm biến để đảm bảo khả năng tương thích.Khi nối dây cảm biến, đầu ra của nó phải được kết nối với chân vi điều khiển tương ứng và nếu mức điện áp khác nhau, các bộ chia điện áp hoặc bộ chuyển cấp nên được sử dụng để ngăn ngừa thiệt hại.Cảm biến phải nhận được nguồn điện chính xác, thường là 5V hoặc 12V và phải chia sẻ một điểm chung với vi điều khiển cho hoạt động ổn định.
Lập trình vi điều khiển để xử lý dữ liệu cảm biến liên quan đến việc viết mã bằng các ngôn ngữ như C, C ++ hoặc Python.Các chức năng như DigitalRead () được sử dụng cho các cảm biến kỹ thuật số, trong khi Symrotread () nắm bắt dữ liệu từ các cảm biến điện áp thay đổi.Khi dữ liệu được truy xuất, nó phải được xử lý các cảm biến kỹ thuật số cung cấp các tín hiệu cao/thấp đơn giản có thể được sử dụng trực tiếp trong logic ứng dụng, trong khi các bài đọc cảm biến tương tự phải được chuyển đổi thành thông tin vị trí có ý nghĩa để giám sát trục cam chính xác.
Thay thế cảm biến vị trí trục cam
Cảm biến vị trí trục cam là một thành phần chính trong các động cơ hiện đại, chịu trách nhiệm giám sát vị trí và tốc độ của trục cam.Dữ liệu này giúp mô -đun điều khiển động cơ (ECM) tối ưu hóa thời gian phun nhiên liệu và đánh lửa.Khi cảm biến thất bại, nó có thể dẫn đến hiệu suất kém, sai lệch, khởi động khó khăn hoặc thậm chí bị đình trệ động cơ.Thay thế cảm biến vị trí trục cam bị lỗi là hiệu quả và độ tin cậy của động cơ khôi phục quan trọng.
Trước khi bắt đầu quá trình thay thế, điều quan trọng là ngắt kết nối pin bằng cách tháo thiết bị đầu cuối âm.Điều này ngăn ngừa các mối nguy điện và bảo vệ các thành phần động cơ nhạy cảm.Khi pin bị ngắt kết nối, hãy xác định vị trí cảm biến vị trí trục cam, được tìm thấy gần trục cam, nắp thời gian hoặc đầu xi lanh.Tư vấn hướng dẫn sử dụng dịch vụ xe có thể giúp xác định chính xác vị trí.
Tiếp theo, tháo cảm biến bị lỗi bằng cách rút đầu nối điện của nó và tháo bu lông lắp.Cẩn thận rút cảm biến cũ, đảm bảo rằng không có các thành phần xung quanh nào bị hỏng trong quá trình.Trước khi cài đặt cảm biến mới, hãy so sánh nó với cái cũ để xác nhận khả năng tương thích.Sau đó, căn chỉnh nó đúng cách, bảo vệ nó với bu lông lắp và kết nối lại đầu nối điện.
Khi cảm biến mới được cài đặt, kết nối lại pin và khởi động động cơ.Kiểm tra xem có bất kỳ đèn cảnh báo hoặc hành vi động cơ không đều.Nếu cần, hãy sử dụng máy quét OBD-II để xóa mã lỗi và xác minh rằng cảm biến đang hoạt động chính xác.Bằng cách làm theo các bước này, bạn có thể đảm bảo thay thế thành công, giúp động cơ hoạt động trơn tru và hiệu quả.
Các ứng dụng của cảm biến vị trí trục cam
Động cơ ô tô
Cảm biến vị trí trục cam, một thành phần trong các động cơ đốt trong hiện đại, đóng vai trò trong việc điều chỉnh thời gian đánh lửa, phun nhiên liệu và thời gian van.Bằng cách cung cấp dữ liệu cho Đơn vị điều khiển động cơ (ECU), cảm biến giúp tối ưu hóa thời gian động cơ, đảm bảo quá trình đốt hiệu quả giúp tăng cường hiệu suất và tiết kiệm nhiên liệu.Nó đặc biệt tuyệt vời trong các hệ thống thời gian van thay đổi (VVT), trong đó nó cho phép điều chỉnh chính xác dựa trên điều kiện lái xe, cải thiện sản lượng điện và giảm phát thải.Cảm biến hỗ trợ phát hiện sai bằng cách xác định chuyển động trục cam không đều, cho phép ECU thực hiện các hiệu chỉnh, chẳng hạn như điều chỉnh việc cung cấp nhiên liệu hoặc thông báo cho người lái xe về các vấn đề tiềm ẩn.Trong thời gian bắt đầu lạnh, cảm biến đảm bảo ECU cung cấp đúng lượng nhiên liệu và điều chỉnh thời gian đánh lửa, tạo điều kiện cho các công ty khởi động động cơ mượt mà và đáng tin cậy hơn, ngay cả ở nhiệt độ thấp.
Tự động hóa công nghiệp
Ngoài các ứng dụng ô tô, cảm biến vị trí trục cam đóng vai trò trong tự động hóa công nghiệp để đồng bộ hóa và thời gian chính xác.Trong thiết bị sản xuất, dây chuyền lắp ráp tự động và máy sản xuất dựa vào thời gian chính xác để đảm bảo hoạt động liền mạch.Cảm biến giúp đồng bộ hóa động cơ và các thành phần cơ học, tăng cường hiệu quả và độ chính xác.Trong robot và điều khiển chuyển động, robot công nghiệp và hệ thống tự động phụ thuộc vào các cảm biến vị trí trục cam để phối hợp chuyển động, cải thiện độ chính xác trong các nhiệm vụ lặp đi lặp lại hoặc tốc độ cao.Các cảm biến này hỗ trợ bảo trì dự đoán bằng cách giám sát dữ liệu quay để phát hiện các dấu hiệu hao mòn sớm trong các thành phần cơ học.Cách tiếp cận chủ động này giúp ngăn ngừa những thất bại bất ngờ, giảm thời gian chết và chi phí bảo trì.
Hệ thống điều khiển động cơ
Cảm biến vị trí trục cam đóng một vai trò trong các ứng dụng điều khiển động cơ, bao gồm cả xe điện và hybrid, cũng như các hệ thống điều khiển động cơ công nghiệp.Trong hệ truyền động lai, nó giúp quản lý sự chuyển đổi giữa động cơ điện và xăng bằng cách đảm bảo thời gian và đồng bộ hóa chính xác, dẫn đến hoạt động mượt mà hơn và cải thiện hiệu quả nhiên liệu.Trong các thiết lập công nghiệp, các động cơ điện hiệu suất cao được sử dụng trong các ngành sản xuất và chế biến phụ thuộc vào sự kiểm soát chính xác tốc độ và mô-men xoắn chính xác.Cảm biến cung cấp phản hồi vị trí chính xác, tăng cường hiệu suất và hiệu quả năng lượng.Trong các máy phát điện và hệ thống năng lượng dự phòng, cảm biến giúp duy trì sự đồng bộ hóa giữa các thành phần cơ học, đảm bảo công suất ổn định và ngăn ngừa sự cố.
Phần kết luận
Cảm biến vị trí trục cam là tuyệt vời để đảm bảo động cơ của xe hơi hoạt động tốt và sử dụng nhiên liệu hiệu quả.Nó giúp máy tính của xe tinh chỉnh hoạt động của động cơ, giúp cải thiện hiệu suất của xe và giữ cho nó hoạt động trơn tru.Nếu cảm biến này ngừng hoạt động đúng, nó có thể gây ra các vấn đề như hiệu suất động cơ kém và tăng mức tiêu thụ nhiên liệu.Giữ cảm biến này ở dạng tốt và sửa chữa nó khi cần thiết là rất quan trọng để duy trì sức khỏe xe của bạn.Bài viết này đã đề cập đến cách cảm biến hoạt động, vai trò của nó trong động cơ và phải làm gì nếu thất bại, hiểu rõ hơn về hoạt động của xe.
Về chúng tôi
ALLELCO LIMITED
Đọc thêm
Yêu cầu nhanh chóng
Vui lòng gửi một yêu cầu, chúng tôi sẽ trả lời ngay lập tức.
Các câu hỏi thường gặp [FAQ]
1. Điều gì xảy ra nếu cảm biến trục cam trở nên xấu?
Nếu cảm biến vị trí trục cam không thành công, động cơ có thể có một số vấn đề.Bạn có thể thấy đèn kiểm tra động cơ bật, trải nghiệm không hoạt động thô, giảm sức mạnh và gia tốc kém.Động cơ cũng có thể bị đình trệ hoặc sai vì cảm biến không thể điều chỉnh đúng thời gian phun nhiên liệu và đánh lửa.
2. Tôi vẫn có thể lái xe với cảm biến vị trí trục cam xấu?
Lái xe với cảm biến vị trí trục cam xấu là có thể nhưng không được khuyến khích.Nó có thể dẫn đến giảm hiệu suất động cơ, tăng mức tiêu thụ nhiên liệu và thiệt hại động cơ tiềm ẩn theo thời gian.Tốt nhất là giải quyết vấn đề càng sớm càng tốt để tránh các biến chứng hơn nữa.
3. Cảm biến vị trí trục cam làm gì?
Một cảm biến vị trí trục cam theo dõi vị trí và tốc độ của trục cam.Thông tin này giúp mô -đun điều khiển động cơ quản lý thời gian phun nhiên liệu và đánh lửa.Thời gian thích hợp là tốt cho hiệu suất động cơ tối ưu, hiệu quả nhiên liệu và kiểm soát khí thải.
4. Một chiếc xe có bao nhiêu cảm biến trục cam?
Số lượng cảm biến trục cam trong xe có thể thay đổi.Một số xe có một cảm biến, trong khi những chiếc khác có thể có hai, đặc biệt nếu động cơ có nhiều trục cam (như trong động cơ hình chữ V hoặc hình chữ v).Mỗi trục cam thường có cảm biến riêng.
5. Bạn có thể làm sạch cảm biến vị trí trục cam không?
Có, bạn có thể làm sạch cảm biến vị trí trục cam nếu nó bẩn hoặc được bao phủ trong các mảnh vụn.Sử dụng chất tẩy rửa tiếp xúc điện hoặc chất tẩy rửa không cư trú tương tự.Tránh các hóa chất khắc nghiệt có thể làm hỏng cảm biến.Làm sạch có thể giải quyết một số vấn đề cảm biến, nhưng nếu cảm biến bị lỗi, nó sẽ cần phải được thay thế.

Adum1400brwz: Pinout, Sơ đồ khối, tính năng và ứng dụng
trên 2025/02/13

Hiểu EPM1270F256I5 Các tính năng chính và chi tiết kỹ thuật
trên 2025/02/12
Bài viết phổ biến
-

Máy tính đặt hướng dẫn phức tạp: Làm thế nào họ thay đổi điện toán?
trên 8000/04/19 147784
-

Pinout và tính năng USB-C
trên 2000/04/19 112081
-
Sử dụng các nguyên thủy mô phỏng hợp nhất xilinx: Hướng dẫn toàn diện về thiết kế và mô phỏng FPGA
trên 1600/04/19 111352
-
Điện áp nguồn trong điện tử: Ý nghĩa của VCC, VDD, VEE, VSS và GND
trên 0400/04/19 83849
-

Hướng dẫn kết nối RJ45: Pinout, hệ thống dây điện, loại cáp và sử dụng
trên 1970/01/1 79649
-
Hướng dẫn cuối cùng về mã màu dây trong các hệ thống điện hiện đại
Cách hệ thống điện của chúng tôi sử dụng màu sắc không chỉ dành cho ngoại hình.Mỗi màu dây hiện chỉ ra một chức năng cụ thể, giúp xác định và xử lý các thành phần điện một cách dễ dàng hơn trong qu...trên 1970/01/1 67023
-

Hướng dẫn van thanh lọc: Chức năng, triệu chứng, xét nghiệm và thay thế cho hiệu suất động cơ tối ưu
Van thanh lọc là một phần quan trọng của hệ thống xe hơi giúp giữ cho không khí sạch bằng cách quản lý hơi nhiên liệu trước khi chúng có thể thoát vào khí quyển.Điều này không chỉ giúp môi trường b...trên 1970/01/1 63142
-
Chất lượng (Q) Yếu tố: Phương trình và ứng dụng
Yếu tố chất lượng, hoặc 'Q', rất quan trọng khi kiểm tra mức độ cuộn cảm và bộ cộng hưởng hoạt động tốt trong các hệ thống điện tử sử dụng tần số vô tuyến (RF).'Q' đo lường mức độ một mạch giảm thi...trên 1970/01/1 63073
-
Đạt được hiệu suất cao nhất với Định lý Truyền công suất tối đa
Định lý truyền năng lượng tối đa giải thích cách năng lượng từ một nguồn, chẳng hạn như pin hoặc máy phát, chảy đến tải được kết nối.Nó cho thấy điều kiện chính xác trong đó tải nhận được nhiều năn...trên 1970/01/1 54100
-

Thông số kỹ thuật và khả năng tương thích của pin A23
Pin A23 là một pin nhỏ, hình xi lanh với điện áp cao.Cũng được gọi là 23A, 23AE hoặc MN21, nó chạy ở mức 12 volt và cao hơn nhiều so với pin AA hoặc AAA.Thiết kế đặc biệt của nó làm cho nó...trên 1970/01/1 52241
Số phần nóng
-

MI1206K601R-10
Laird-Signal Integrity Products
FERRITE BEAD 600 OHM 1206 1LN
ADM6321CY46ARJ-RL7
Analog Devices Inc.
IC SUPERVISOR 1 CHANNEL SOT23-5
1812AA221JAT1A\SB
KYOCERA AVX
CAP CER 220PF 1KV C0G/NP0 1812
AP2125KS-1.8TRG1
Diodes Incorporated
IC REG LINEAR 1.8V 300MA SC70-5
AD7891BSZ-2
Analog Devices Inc.
IC DAS 12BIT 500K 44MQFP
BZG05C47-HE3-TR
Vishay General Semiconductor - Diodes Division
DIODE ZENER 47V 1.25W DO214AC
7-1761614-0
TE Connectivity AMP Connectors
CONN DIFF ARRAY PLUG 200POS SMD
RC0805FR-079K09L
YAGEO
RES 9.09K OHM 1% 1/8W 0805
S912XET256J1MAA
NXP USA Inc.
IC MCU 16BIT 256KB FLASH 80QFP
843204AGILFT
Renesas Electronics America Inc
IC FREQ SYNTH 48TSSOP
CD22M3494MQZ96
Intersil
IC CROSSPOINT SW 1 X 16:8 44PLCC
RT0402DRE0768KL
YAGEO
RES SMD 68K OHM 0.5% 1/16W 0402
170M6211
Eaton - Bussmann Electrical Division
FUSE SQUARE 700A 700VAC RECT
SI8030AA-B-IUR
Skyworks Solutions Inc.
DGTL ISO 1000VRMS 3CH GP 16QSOP
VY1221K31Y5SQ63V0
Vishay Beyschlag/Draloric/BC Components
CAP CER 220PF 760VAC Y5S RADIAL
MAX6165AESA
Analog Devices Inc./Maxim Integrated
IC VREF SERIES 0.04% 8SOIC
PS-35-12
MEAN WELL USA Inc.
AC/DC CONVERTER 12V 36W
TSL1112RA-100M3R7-PF
TDK Corporation
FIXED IND 10UH 3.7A 25 MOHM TH -

Q8040K7TP
Littelfuse Inc.
TRIAC ALTERNISTOR 800V 40A TO218
LTC4442IMS8E-1#PBF
Analog Devices Inc.
IC GATE DRVR HALF-BRIDGE 8MSOP
CBTL06DP211EE,118
NXP USA Inc.
IC MUX 6CH DISPLAY PORT 48TFBGA
AQY280SX
Panasonic Electric Works
SSR RELAY SPST-NO 120MA 0-350V
LMV324IPWR
Texas Instruments
IC OPAMP GP 4 CIRCUIT 14TSSOP
QS34XVH245Q3G8
Renesas Electronics America Inc
IC BUS SWITCH 1 X 8:1 80QVSOP
MC34PF3001A7EP
NXP USA Inc.
IC POWER MANAGEMENT 48QFN
AT45DB161D-MU
Adesto Technologies
IC FLASH 16MBIT SPI 66MHZ 8VDFN
C2012X7R1H684K125AB
TDK Corporation
CAP CER 0.68UF 50V X7R 0805
TSV6391AICT
STMicroelectronics
IC OPAMP GP 1 CIRCUIT SC70-5
IR1153SPBF
Infineon Technologies
IC PFC CTRLR CCM 22.2KHZ 8SOIC
HIN239CBZ
Renesas Electronics America Inc
IC TRANSCEIVER FULL 3/5 24SOIC
BLM31PG601SN1L
Murata Electronics
FERRITE BEAD 600 OHM 1206 1LN
VE-240-IU
Vicor Corporation
DC DC CONVERTER 5V 200W
LFE2-20SE-5QN208C
Lattice Semiconductor Corporation
IC FPGA 131 I/O 208QFP
SN74AVCH4T245RSVR
Texas Instruments
IC TRANSLATION TXRX 3.6V 16UQFN
MCR20AVHM
NXP USA Inc.
IC RF TXRX 802.15.4 41VFLGA
V5.5MLA0603NH
Littelfuse Inc.
VARISTOR 8.2V 30A 0603 -

LM56BIMM
Texas Instruments
SENSOR ANALOG -40C-125C 8VSSOP
74AC253SC
Fairchild Semiconductor
IC MULTIPLEXER 2 X 4:1 16SOIC
MT53D512M16D1DS-046 WT:D
Micron Technology Inc.
IC DRAM 8GBIT 2.133GHZ 200WFBGA
STPS20170CG
STMicroelectronics
DIODE ARRAY SCHOTTKY 170V D2PAK
P6SMB33AHE3/52
Vishay General Semiconductor - Diodes Division
TVS DIODE 28.2VWM 45.7VC DO214AA
MOC208M
Fairchild Semiconductor
TRANSISTOR OUTPUT OPTOCOUPLER
UPSD3434EB40T6
STMicroelectronics
IC MCU 8BIT 288KB FLASH 52LQFP
PI6CB18401ZHIEX
Diodes Incorporated
IC CLK BUFFER 1:4 100MHZ 32TQFN
BTS3046SDLATMA1
Infineon Technologies
IC PWR SWITCH N-CHAN 1:1 TO252-3
GRM1887U1H822JA01J
Murata Electronics
CAP CER 8200PF 50V U2J 0603
TLV3012AIDBVRG4
Texas Instruments
IC COMPARATOR 1 W/VOLT REF SOT23
TPS62403DRCR
Texas Instruments
IC REG BUCK PROG/2.8V DL 10SON
MBRS2040LT3
onsemi
DIODE SCHOTTKY 40V 2A SMB
SMA6J9.0CA
Littelfuse Inc.
TVS DIODE 9VWM 15.4VC DO214AC
FDG6302P
onsemi
MOSFET 2P-CH 25V 0.14A SC70-6
SMDA12C.TBT
Semtech Corporation
TVS DIODE 12VWM 24VC 8-SO
08055U3R3CAT2A
KYOCERA AVX
CAP CER 3.3PF 50V NP0 0805
74LVTH16373MTD
onsemi
IC LATCH TRANSP 16BIT 48TSSOP